На чем основан принцип действия сейсмографа. Измерительные приборы сейсмограф
Для обнаружения и регистрации всех типов сейсмических волн используются специальные приборы - сейсмографы . В большинстве случаев сейсмограф имеет груз с пружинным прикреплением, который при землетрясении остаётся неподвижным, тогда как остальная часть прибора (корпус, опора) приходит в движение и смещается относительно груза. Одни сейсмографы чувствительны к горизонтальным движениям, другие - к вертикальным. Волны регистрируются вибрирующим пером на движущейся бумажной ленте. Существуют и электронные сейсмографы (без бумажной ленты).
Магниту́да землетрясе́ния (от лат. magnitudo - важность, значительность, крупность, величие) - величина, характеризующая энергию, выделившуюся при землетрясении в виде сейсмических волн. Первоначальная шкала магнитуды была предложена американским сейсмологом Чарльзом Рихтером в 1935 году, поэтому в обиходе значение магнитуды называют шкалой Рихтера.
Шкала Рихтера содержит условные единицы (от 1 до 9,5) - магнитуды, которые вычисляются по колебаниям, регистрируемым сейсмографом. Эту шкалу часто путают со шкалой интенсивности землетрясения в баллах (по 12-балльной системе), которая основана на внешних проявлениях подземного толчка (воздействие на людей, предметы, строения, природные объекты). Когда происходит землетрясение, то сначала становится известной именно его магнитуда, которая определяется по сейсмограммам, а не интенсивность, которая выясняется только спустя некоторое время, после получения информации о последствиях.
В теории расчета сооружений на сейсмические воздействия (теория сейсмичности), как и в других областях динамики различных механических систем, обычно применяются расчетные с распределенными и дискретными параметрами (массами). Система с дискретными параметрами хотя и носит приближенный характер, но более универсальна и можно получить решение для системы любой сложности, вследствие чего наиболее часто применяются в инженерных расчетах.
Для получения динамичных расчетных схем в виде системы с конечным числом степеней свободы, фактическая распределенная масса система концентрируется в определенных местах в виде материальных точек. В итоге получается невесомая система, несущая определенное количество сосредоточенных масс. Число степеней свободы система равно числу независимых геометрических параметров, однозначно определяющих положение сосредоточенных масс в произвольном моменте времени.
Массы рассматриваемой системы целесообразно сконцентрировать в местах, где сосредоточены значительные нагрузки. Достоверность и точность результатов расчета в значительной мере зависит от удачного выбора расчетной схемы, ее соответствия фактическим условиям работы сооружения.

Рис. 55Расчетная схема здания, подвергающегося воздействию сейсмических нагрузок
В качестве примера рассмотрим методику расчета здания, имеющего и этажей на сейсмическом воздействии. Сконцентрировав массу звания на уровнях перекрытия и фундаментной плиты, получим систему в виде консольного стержня жестко заделанной в фундаментной плите, лежащей в условиях полного прилипания на поверхности упругого инерционного основания (рис. 55).
Будем рассматривать поперечные колебания стержня в плоскости (zy) Начало системы координат поместим в центре тяжести подошвы фундамента сооружения. Жесткость стержня по высоте изменяется по произвольному закону. На характер деформаций стержня не накладывается никаких ограничений, кроме требования линейной деформируемости.
Положение системы в произвольный момент времени t > 0 определяется линейными горизонтальными смещениями (),(i=1.2….n+1) (рис. 55).
Так как есть перемещение грунтов основания при землетрясении на свободной поверхности земли, в предположении отсутствия сооружения, то оно здесь принимается заранее заданной величиной. Следовательно, если нам удастся определить величины (i=1,2,…,n+1), мы через значения этих величин в произвольный момент времени можем определить положение заданной системы.
Отсюда следует, что рассматриваемая система, располагая (n+1) количеством сосредоточенных масс, имеет (n + I) степеней свободы.
Колебания линейной системы при заданном внешней кинематическом воздействии полностью определяется ее инерционными и деформативными свойствами и параметрами рассеивания энергии. Инерционные свойства рассматриваемой системы характеризуются сосредоточенными массами (i=1,2,…,n+1), и характером их распределения по высоте. Деформативные свойства системы могут быть охарактеризованы при помощи единичных перемещений ), представляют собой горизонтальное перемещение точек i от действия единичной горизонтальной силы, приложенной в точке к. Перемещение в рамках принятой расчетной схемы определяется
![]()
где горизонтальные перемещения точки i от действия единичной горизонтальной силы, приложенной в точке к, обусловленные соответственно: деформациями конструктивных элементов здания; относительным сдвигом между подошвой фундаментной плиты и основанием; поворотом подошвы фундаментной плиты относительно основания.
Выражение можно записать в следующем виде
Так как фундаментная плита считается абсолютно жесткой, поэтому при i=n+1, или k=n+1 следует принимать Здесь определяется по формуле Мора; - являются коэффициентами квазистатической жесткости основания при равномерном сдвиге и неравномерном сжатии или растяжении и их значения можно определить по следующим соотношениям.
Где приняты следующие обозначения: - скорость распространения поперечных волн в грунтах; р - плотность грунтов основания; F-площадь подошвы фундаментной плиты; - момент инерции площади подошвы фундаментной плиты относительно оси х.
Для учета рассеивания энергии при колебаниях системы воспользуемся теорией Фойгта, согласно которой диссипативные Силы прикладываются к сосредоточенным массам в состоянии движения системы, величина которых пропорциональна скорости движения сосредоточенных масс. Коэффициенты пропорциональности для рассматриваемой системы определяются по формуле

Величина ![]() - логарифмический декремент колебания, характеризует рассеивания энергии по корректированной гипотезе Фойгта за счет внутреннего неупругого сопротивления материалов конструкций при их деформации; - характеризует излучение энергии в основании за счет сдвиговых деформаций, происходящих на контактной поверхности между фундаментной плитой и основанием; - коэффициент рассеивания энергии за счет неравномерных линейных деформаций, происходящих на контактной поверхности между фундаментной плитой и основанием.
- логарифмический декремент колебания, характеризует рассеивания энергии по корректированной гипотезе Фойгта за счет внутреннего неупругого сопротивления материалов конструкций при их деформации; - характеризует излучение энергии в основании за счет сдвиговых деформаций, происходящих на контактной поверхности между фундаментной плитой и основанием; - коэффициент рассеивания энергии за счет неравномерных линейных деформаций, происходящих на контактной поверхности между фундаментной плитой и основанием.
Акустическое сопротивление основания при равномерном сдвиге и неравномерного сжатия и растяжения определяются по известным соотношениям.
Где ![]() - скорость распространения продольных волн в грунтовом основании.
- скорость распространения продольных волн в грунтовом основании.
Воспользуемся методом сил и запишем величину перемещения yi (t) произвольной массы с номером i=1,2,…n+1 , от действия сил инерции и сил учитывающих рассеивание энергии в рассматриваемой системе:
Здесь сила инерции, действующая на k-ю массу и определяется по принципу Даламбера:
Сила сопротивления , возникающая в к- й массе, согласно гипотезе Фойгта, прямо пропорциональна величине скорости его движения:
Подставляя выражения (79) и (80) в (78) и после некоторых преобразований получим дифференциальное уравнение движения заданной системы в следующем виде:
Для расчета сооружений на сейсмические воздействия справедливы нулевые начальные условия, та. предполагается, что до начала землетрясения сооружение находится в состоянии покоя. При землетрясении сооружение, переходя в движение, ее состояние характеризуется системой уравнений (81).
Для расчета системы дифференциальных уравнений (81) применяется метод преобразования Лапласа, т.е. искомые функции находятся по формуле
![]() (82)
(82)
где является изображением функции y i (t) по Лапласу и определяется по формуле
Подставляя (82) в (81) и с учетом нулевых начальных условий задачи, получим:
Последнее представляет систему алгебраических уравнений относительно перемещений в изображениях Лапласа.
Решение (84) в изображениях записывается в виде
Где - представляет собой определитель системы неоднородных алгебраических уравнений (84);D(s) - определитель той же системы при неизвестных.
Применяя к выражению (85) операции обратного преобразования Лапласа с применением теоремы сверло, получим решение задачи в следующем виде:
В традиционных методах расчета сооружения на сейсмостойкость, как правило, применяется следующее упрощающее допущение, что основание сооружения является абсолютно твердым телом, т.е. с = ¥ и с 1 = ¥. Если исходить из условия существования полного прилипания между фундаментной плитой и основанием на их контактной поверхности, очевидно, что масса с номером n+1 , фундаментная плита полностью повторяет закон движения основания. С другой стороны, так как закон движения основания в данном случае считается исходной известной функцией, следовательно, закон движения фундаментной плиты тоже следует считать известной величиной. Поэтому число степеней свободы рассматриваемой системы (см. рис. 55) на одну единицу уменьшается и принимает значение равное n
Искомыми величинами в данном случае являются перемещения сосредоточенных масс с номерами i=1,2..n.
С учетом данного обстоятельства уравнение движения сооружения из (74) упрощается и принимает вид
Для решения системы дифференциальных уравнений (87) с постоянными коэффициентами применяется метод разложения колебаний по формам, основанный на методе разделения переменных, те.
Сначала, для определения собственной частоты и собственного вектора , рассматриваются собственные колебания системы без учета сил сопротивления. В данном случае из (87) получим уравнения движения системы без учета сил сопротивления в свободном режиме колебаний
Подставляя решение (88) в (90), с учетом условий ортогональности собственных форм колебаний, т.е.
и после ряда преобразований получим
Выполнение этих равенств для произвольного значения t возможно лишь в том случае, если каждая из них в отдельности равна одной и той же постоянной при любом значении v. Обозначив эту постоянную через , получим
Последние уравнения представляют собой систему n линейных однородных алгебраических уравнений относительно неизвестных для каждой v= 1,2... n формы колебаний.
Сейсмограф
Сейсмограф
Сейсмограф - специальный измерительный прибор , который используется для обнаружения и регистрации всех типов сейсмических волн. В большинстве случаев сейсмограф имеет груз с пружинным прикреплением, который при землетрясении остаётся неподвижным, тогда как остальная часть прибора (корпус, опора) приходит в движение и смещается относительно груза. Одни сейсмографы чувствительны к горизонтальным движениям, другие - к вертикальным. Волны регистрируются вибрирующим пером на движущейся бумажной ленте. Существуют и электронные сейсмографы (без бумажной ленты).
До недавнего времени в качестве чувствительных элементов сейсмографов в основном использовались механические или электромеханические устройства. Вполне естественно, что стоимость таких инструментов, содержащих элементы точной механики, является настолько высокой, что они практически недоступны для рядового исследователя, а сложность механической системы и, соответственно, требования к качеству ее исполнения фактически означают невозможность изготовления подобных приборов в промышленных масштабах.
Бурное развитие микроэлектроники и квантовой оптики в настоящее время привело к появлению серьёзных конкурентов традиционным механическим сейсмографам в средне- и высокочастотной области спектра. Однако, такие устройства на основе микромашинной технологии, волоконной оптики или лазерной физики, обладают весьма неудовлетворительными характеристиками в области инфранизких частот (до нескольких десятков Гц), что является проблемой для сейсмологии (в частности, организации телесейсмических сетей).
Существует и принципиально иной подход к построению механической системы сейсмографа - замена твёрдой инерционной массы жидким электролитом. В таких устройствах внешний сейсмический сигнал вызывает поток рабочей жидкости, который, в свою очередь, преобразуется в электрический ток с помощью системы электродов. Чувствительные элементы подобного типа получили название молекулярно-электронных. Преимуществами сейсмографов с жидкой инерционной массой является низкая стоимость, продолжительный, порядка 15 лет, срок службы и отсутствие элементов точной механики, что резко упрощает их изготовление и эксплуатацию.
Компьютеризированные сейсмоизмерительные системы
С появлением компьютеров и аналого-цифровых преобразователей функциональность сейсмоизмерительного оборудования резко повысилась. Появилась возможность одновременно фиксировать и анализировать в реальном времени сигналы с нескольких сейсмодатчиков, учитывать спектры сигналов. Это обеспечило принципиальный скачок в информативности сейсмоизмерений.
Примеры сейсмографов
- Молекулярно-электронный сейсмограф. .
- Автономный донный сейсмограф. . Архивировано из первоисточника 3 декабря 2012.
Wikimedia Foundation . 2010 .
Синонимы :Смотреть что такое "Сейсмограф" в других словарях:
Сейсмограф … Орфографический словарь-справочник
- (греч., от seismos колебание, сотрясение, и grapho пишу). Аппарат для наблюдения землетрясений. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. СЕЙСМОГРАФ греч., от seismos, потрясение, и grapho, пишу. Аппарат для… … Словарь иностранных слов русского языка
Син. термина сейсмоприемник. Геологический словарь: в 2 х томах. М.: Недра. Под редакцией К. Н. Паффенгольца и др.. 1978 … Геологическая энциклопедия
Геофон, сейсмоприемник Словарь русских синонимов. сейсмограф сущ., кол во синонимов: 2 геофон (1) … Словарь синонимов
- (от сейсмо... и...граф) прибор для записи колебаний земной поверхности во время землетрясений или при взрывах. Основные части сейсмографа маятник и регистрирующее устройство … Большой Энциклопедический словарь
- (сейсмометр), прибор для измерения и записи СЕЙСМИЧЕСКИХ ВОЛН, вызванных движением (ЗЕМЛЕТРЯСЕНИЕМ или взрывом) в земной коре. Колебания записываются с помощью пишущего элемента на вращающемся барабане. Некоторые сейсмографы способны улавливать… … Научно-технический энциклопедический словарь
СЕЙСМОГРАФ, сейсмографа, муж. (от греч. seismos трясение и grapho пишу) (геол.). Прибор для автоматической записи колебаний земной поверхности. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
СЕЙСМОГРАФ, а, муж. Прибор для записи колебаний земной поверхности во время землетрясений или при взрывах. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
Сейсмограф - - прибор, предназначенный для записи колебаний земной поверхности, вызываемых сейсмическими волнами. Состоит из маятника, например, стальной гирьки, которая на пружине или тонкой проволоке подвешена к стойке, прочно закрепленной в грунте.… … Нефтегазовая микроэнциклопедия
сейсмограф - Прибор для преобразования механических колебаний почвы в электрические и последующей записи на светочувствительной бумаге. [Словарь геологических терминов и понятий. Томский Государственный Университет] Тематики геология, геофизика Обобщающие… … Справочник технического переводчика
Книги
- Игровые миры: от homo ludens до геймера , Тендрякова Мария Владимировна. Автор обращается к самому широкому кругу игр: от архаичных игрищ, игр-гаданий и состязаний до новомодных компьютерных игр. Сквозь призму игры и происходящих с играми трансформаций - моду на…
Использование: сейсмология, для контроля и записи вибрационных перемещений земной коры при различных динамических процессах как на поверхности так и внутри грунтовых массивов, а также любого технологического оборудования, включая атомные реакторы. Сущность изобретения: содержит герметический корпус, в котором размещены шасси, маятник, демпфирующее устройство, преобразователь перемещения маятника, узел компенсации момента силы тяжести, узел качения и элементы связи и передачи информации на диспетчерский пункт. Все элементы, размещенные на маятнике, кроме своих непосредственных функций, создают дополнительный момент инерции, направленный на понижение резонансной частоты за счет периферийного размещения симметрично относительно центра тяжести маятника. Корпус прибора, кроме своих защитных функций, участвуют в создании понижения добротности собственной резонансной частоты шасси за счет использования системы крепления и за счет легкой прессовой посадки шасси в корпусе. Компактное размещение узлов обусловлено выбором формы маятника: титановая трубка со скошенными торцами и с технологическими и крепежными отверстиями, а также выполнением узла качения: пара ножей, одна из которых жестко закреплена на цилиндрической форме маятника, а другая связана с шасси, причем ножи размещены друг относительно друга встречно с возможностью установки осевой линии их кромок закругления по одной прямой. 6 ил.
Изобретение относится к сейсмологии, в частности к конструкциям приемников сейсмических сигналов, и может быть использовано для контроля и записи вибрационных перемещений земной коры при различных динамических процессах как на поверхности, так и внутри грунтовых массивов, а также любого технологического оборудования, включая ядерные реакторы. Известен сейсмограф ВЭГИК для изучения сейсмического эффекта взрывов, регистрации землетрясений и микросейсм первого рода . Сейсмограф содержит маятник, подвешенный к стойкам на двух парах взаимно перпендикулярных тонких стальных пластин (крестовой упругий шарнир), образующих ось вращения маятника. Для регистрации вертикальных колебаний оси вращения придается горизонтальное положение, а маятник находится в горизонтальном положении (центр тяжести в одной горизонтальной плоскости с осью вращения удерживается при помощи стальной винтовой пружины). Положение равновесия маятника регулируется винтом, меняющим натяжение пружины, а период собственных колебаний (Т 1 = 0,8-2 с) - путем изменения угла наклона пружины и сменой подвесных стальных пластин. Для регистрации горизонтальных колебаний пружина снимается с маятника, прибор поворачивается на 90 о и становится на три установочных винта. Маятник оканчивается легкой дюралюминиевой формой, на конце которой жестко укреплен легкий цилиндрический каркас из плексигласа с намотанными на нем двумя обмотками (катушками) из тонкого эмалированного медного провода. Катушка находится в цилиндрическом воздушном зазоре постоянного магнита. Одна из катушек служит для регистрации движения маятника, другая - для регулировки его затухания. Маятник со стойками и магнит смонтированы на плоской станине, которая жестко крепится в металлическом корпусе. Одна из боковых стенок для наблюдения за состоянием маятника сделана из плексигласа. Регистрация колебаний производится обычно при помощи малогабаритных гальванометров . Недостатком известного сейсмографа является низкая надежность, обусловленная наличием крестообразного подвеса. Резкие колебания (при взрывах, толчках) сминают или срезают пластины. Наиболее близким по технической сущности к предлагаемому изобретению является сейсмограф ВБП-3, содержащий маятник, состоящий из двух неравных, но близких по величине масс, размещенных симметрично с двух сторон от оси вращения. Маятник выполнен в виде плоской алюминиевой рамки, на одной стороне которой для уменьшения массы высверлены отверстия. Для прочности у рамки имеются ребра жесткости. Латунные полуоси, закрепленные на рамке и посаженные в радиальные шарикоподшипники, образуют ось вращения маятника. Цилиндрическая рамка из электролитической меди, закрепленная на маятнике, служит для демпфирования его собственных колебаний. На рамку намотана тонким медным эмалированным проводом плоская индукционная катушка, служащая преобразователем. Маятник на подшипниках установлен в гнездах латунной скобы, жестко прикрепленной к полюсным наконечникам подковообразного постоянного магнита из сплава "Магнико". Полюсные наконечники из мягкого железа приклеены к магниту клеем БФ. На скобе на двух направляющих стержнях установлен еще цилиндрический сердечник из мягкого железа. В воздушном зазоре между полюсными наконечниками и сердечником образуется равномерное радиальное магнитное поле. При намагничивании сердечник снимается, иначе основной магнитный поток направляется через него, а не через магнит. Взамен сердечника в воздушный зазор вводится латунный клин, чтобы избежать поломки магнита. В этом зазоре находится медная рамка демпфера с индукционной катушкой преобразователя. При такой системе подвески маятник колеблется с угловыми поворотами до 30 о в обе стороны от положения равновесия, не ударяясь об ограничители (скобу). Магнит с маятником вставляется в выемку станины (шасси) и жестко крепится к ней перекладиной и болтами. Концы индукционной катушки выведены к колодке на станине. К ней же подведен кабель, пропущенный через герметичный сальник в станине. Защитный кожух из немагнитного материала прижимается болтами к станине через резиновую прокладку и обеспечивает герметичность прибора до давления в 2 атм. На станине укреплена ручка для переноски прибора. Жестко связанные между собой скоба, магнит, станина и кожух образуют основание прибора, которое при измерениях следует за движением объекта, маятник при этом стремится остаться в покое. В индукционной катушке возбуждается ЭДС, пропорциональная скорости движения основания относительно маятника. Эта ЭДС подается на клеммы гальванометра магнитоэлектрического осциллографа (регистратора) . Недостатком известного сейсмографа является низкая чувствительность, обусловленная тем, что подвес маятника осуществлен на осях, вращающихся в шарикоподшипниках. Цель изобретения - повышение чувствительности, расширение диапазона измерения в сторону нижних частот, противогрузочной способности и создание технической возможности размещения в вертикальных каналах и скважинах (уменьшение габаритов). На фиг.1 представлена конструктивная схема сейсмографа; на фиг.2 - узел качения; на фиг.3 - разрез по А-А на фиг.2; на фиг.4 - узел I на фиг.3; на фиг.5 - разрез по Б-Б на фиг.2; на фиг.6 - узел II на фиг.5. Сейсмограф состоит из жесткого цилиндрического корпуса 1 (герметичного), который через зажимное кольцо 2 шпильками 3 крепится к объекту 4 исследования. Внутри корпуса 1 размещено шасси 5, крепление которого к корпусу 1 осуществлено посредством стопорного резьбового кольца 6, фиксированного верхней запаянной крышкой 7. Для ликвидации взаимных подвижек корпуса 1 и шасси, вызванных различиями в температурных коэффициентах расширения материалов, предусмотрена предварительно нагруженная с усилием 400 Н плоская пружина 8, расположенная между днищем корпуса 1 и основанием шасси 5. Конструктивные шип и паз (без позиции) в данном соединении препятствуют повороту шасси 5 относительно корпуса 1. Внутри корпуса 1 размещен маятник 9, выполненный из титановой трубки со скошенными торцами и с технологическими и крепежными отверстиями на его образующей поверхности. Маятник 9 соединен с узлом качения 10 посредством титанового кронштейна 11. Сейсмограф имеет измерительный преобразователь перемещения маятника, демпфирующее устройство, узел компенсации момента силы тяжести и элементы связи и передачи информации на диспетчерский пункт. На несущей конструкции маятника 9 симметрично относительно горизонтальной плоскости, проходящей через центр тяжести, установлены по мере удаления от этого центра тяжести следующие элементы: замыкатель 12 (шунтирующая часть) преобразователя перемещения, каркас 13 из проводящего немагнитного материала с силовой обмоткой 14 узла компенсации и пассивный элемент 15 (медная пластинка) демпфирующего устройства. Кроме того, на маятнике 9 размещены элементы, повышающие жесткость маятника, и элементы балансировки маятника (не показаны). На шасси 5 закреплены ответные части: катушки 16 - активные системы преобразователя перемещения, магнитные системы 17 узла компенсации момента силы тяжести, магнитные системы 18 демпфирующих устройств, узел качения 10 (подвески) маятника 9, магнитные экраны 19, клеммные колодки (не показаны) и опорные элементы (не показаны) трассировки проводов (элементы связи и передачи информации на диспетчерский пункт). Активные системы - катушки 16 преобразователя перемещения состоят из П-образного магнитопровода, выполненного из электролитической стали, обмотки - из провода ПНЭТ - КСОТ, содержащих по 150 витков, и держателя с магнитами элементами фиксации провода. В конструкции держателя предусмотрены элементы, увеличивающие его жесткость (например, в виде дополнительных ребер жесткости). Магнитные системы 17 узла компенсации силы тяжести выполнены в виде коаксиально-цилиндрической конструкции с кольцевым магнитом (из материала 10 НДК 35Т5А) и магнитопроводов (из сплава 49 КФ 2), обеспечивающих цилиндрический рабочий зазор с индукцией магнитного поля 1 Тл. Обечайка (без позиции) магнитной системы 17 выполнена из титанового сплава. Соединение деталей магнитной системы осуществлено спецклеем, выдерживающим нагрев до 400 о С (например К-400). Кроме того, узел компенсации может быть выполнен в виде индукционного токовихревого привода, статорная часть которого жестко закреплена на шасси. Магнитные системы 18 демпфирующих устройств выполнены в виде О-образного магнитопровода с парой последовательно включенных магнитов. Элементы крепления магнитной системы допускают регулировку демпфирования путем шунтирования части рабочего магнитного потока. Магнитные экраны 19 представляют собой пластины из стали Ст10 и предназначены для ослабления влияния полей рассеяния магнитных систем на пассивные элементы - замыкатели 12 преобразователя перемещения маятника. Клеммная колодка выполнена из керамики и несет на себе клеммы, к которым методом контактной сварки присоединены провода. Опорные элементы трассировки проводов выполнены из керамики и расположены как на самом шасси, так и в специально отведенных каналах. Узел качения имеет опорный нож 20, жестко связанный при помощи кронштейна 11 с маятником 9, и вспомогательный нож 21, связанный с шасси 5 через упругий элемент 22 (силовая пружина). Ножи 20 и 21 установлены друг относительно друга встречно и имеют систему (регулировки) совмещения осевой линии их кромок закругления (осей ножей) по вертикали - гайка 23, и по горизонтали путем вращения ножа 21 вокруг продольной его оси стержнями, вставляемыми в специальные отверстия 24. Опорный узел подвески маятника выполнен из стали Р18, закаленной до HRC 65 ед, и представляет собой конструкцию, содержащую подушки 25 под опорный нож 20, пластины 26 - ограничители горизонтальных подвижек ножа, паз 27 для укладки силовой пружины 22 и винты 28 установки требуемого прижимного усилия с автофикcацией. Все элементы электромагнитных систем (преобразователя перемещения, демпфирующего устройства и узла компенсации) являются элементами оригинального исполнения, в основу которых заложены известные конструктивные и технологические приемы. Сейсмограф работает следующим образом. Принцип работы основан на преобразовании вертикальных возмущающих (вибрационных) перемещений основания сейсмографа во вращательные движения вертикального маятника 9 Голицына. Для приведения системы в равновесие в оси должен действовать постоянный, независящий от угла момент M m , компенсирующий действие силы тяжести. Значение этого момента определяется выражением M m = m g l cos , где m - масса маятника; g - ускорение свободного падения, l - длина рычага; - угол провисания. На центр тяжести (ЦТ) маятника 9 действует сила, создающая момент m g l. Компенсирующий момент создается парой сил электромагнитной системы 13, 14, 17. Причем неподвижным элементом являются магнитные системы 17, исключающие влияние внешних магнитных полей (за счет экранировки обмотки магнитопровода системы 17). Совокупность масс элементов 12, 13, 14, 15, массы маятника 9, а также их взаимное расположение (симметрично относительно горизонтальной плоскости, проходящей через ЦТ маятника) на перифериях маятника определяют момент инерции I и положение ЦТ маятника. Пренебрегая трением в опоре узла качения 10, выражение для амплитудно-частотной характеристики (АЧК) можно представить в виде =  где А вых - амплитуда перемещения замыкателя 12 преобразователя перемещения маятника; А вх - амплитуда вертикальных входных перемещений; - 6,28 F - круговая частота вибрационных воздействий; F - частота вибрации; o =
где А вых - амплитуда перемещения замыкателя 12 преобразователя перемещения маятника; А вх - амплитуда вертикальных входных перемещений; - 6,28 F - круговая частота вибрационных воздействий; F - частота вибрации; o =![]() - собственная частота маятника;
- собственная частота маятника;
bc - декремент затухания (подбирается в процессе настройки);
R - расстояние от оси вращения. Вращательное движение вертикального маятника 9 преобразуется с помощью замыкания 12 и катушки 16 в электрический сигнал. Индуктивный полумост, на базе которого выполнен преобразователь перемещения маятника, питается переменным напряжением частотой 5 кГц и амплитудой до 30 В (преимущественно 25 В). Электромагнитные системы 13, 14, 17, поддерживающие маятник 9 в подвешенном состоянии, питаются от стабилизатора тока, который соединен кабелем КУГВЭВ нг (по линии питания переменным напряжением 5 кГц) и кабелем КВВГЭ нг (по линии питания постоянным током). Сейсмограф прошел испытания и подтвердил свою эффективность. Сейсмограф компактен (габариты: высота корпуса Н = 350 мм 0,5, диаметр d = 74 мм 0,5) за счет использования некоторых узлов конструкции для выполнения нескольких функций. Так, узлы 13, 14, 17 кроме создания компенсационной пары сил выполняют дополнительную функцию демпфера. Ножи 20, 21, кроме выполнения функции оси вращения, несут функцию удержания контакта при перегрузках более 1 g за счет встречного расположения. Все элементы, размещенные на маятнике, кроме своих непосредственных функций создают дополнительный момент инерции, направленный на понижение резонансной частоты за счет периферийного размещения симметрично относительно ЦТ маятника. Корпус 1, кроме своих защитных функций, участвует в создании понижения добротности собственной резонансной частоты шасси 5 за счет использования системы крепления (гайка 6) и за счет легкой прессовой посадки шасси 5 в корпусе 1. Применение изобретения позволит повысить надежность эксплуатации промышленных агрегатов в районах с сейсмической активностью. Высокая чувствительность в области низких частот (0,1-2 Гц) делает этот прибор незаменимым при контроле начала аварийных ситуаций особенно на взрывоопасных объектах, использующих атомную энергию.
Формула изобретения
СЕЙСМОГРАФ, содержащий герметичный корпус, в котором размещены шасси, маятник, узел качения, электромагнитный преобразователь перемещения маятника, узел компенсации момента силы тяжести, электромагнитное демпфирующее устройство и элементы линии связи с регистратором, отличающийся тем, что электромагнитный преобразователь перемещения маятника, узел компенсации момента силы тяжести и электромагнитное демпфирующее устройство выполнены из двух идентичных систем, размещенных симметрично относительно плоскости, проходящей через центр тяжести маятника и перпендикулярной к его оси вращения, при этом маятник выполнен в виде протяженной фигурной полой цилиндрической формы, а узел качения выполнен в виде пары ножей, один из которых жестко закреплен на цилиндрической форме, а другой нож связан с шасси через упругий элемент, причем ножи размещены друг относительно друга встречно с возможностью установки осевой линии их кромок закругления по одной прямой, узел компенсации выполнен в виде коаксиально установленных магнитной системы, закрепленной на шасси, и полой глухой катушки, обмотка которой размещена на каркасе из проводящего немагнитного материала, жестко закрепленного на маятнике, на котором установлены пассивные элементы демпфирующего устройства и преобразователя перемещения маятника, а магнитные системы демпфирующего устройства и преобразователя перемещения закреплены на шасси, при этом пассивные элементы преобразователя перемещения маятника, узла компенсации момента силы тяжести и демпфирующего устройства размещены на противоположных концах цилиндрической формы маятника.
| Сейсмограф
Сейсмограф (греческое происхождение и образовано от двух слов: «seismos » - сотрясение, колебание, и «grapho » - писать, записывать) - специальный измерительный прибор, который используется в сейсмологии для обнаружения и регистрации всех типов сейсмических волн.
Древние времена
Китай славится своими изобретениями, но и они, увы, устаревают и меняются. Бумага эволюционировала до цифровых носителей, порох давно стал «жидким» и даже компасов развелось более дюжины разновидностей. Или, к примеру, сейсмограф. Современный аппарат для фиксирования колебаний земли выглядит солидно – вылитый детектор лжи или шпионский прибор. Он совсем не похож на самый первый сейсмограф - немного нелепый на вид, но довольно точный. Его изобрел во времена правления династии Хань (25-220 н.э.) ученый Чжан Хэн.Создатель первого сейсмографа родился в городе Наньян (провинция Хэнань). Ещё в детстве Хэн проявлял любовь к наукам. С годами он вошел в китайскую историю и сделал много полезного для астрономии и математики. В исторических заметках того времени значится, что этот изобретатель был спокойным и уравновешенным и старался не высовываться. Кроме увлечения наукой Чжан Хэна умел писать стихи.
Изобретатель сейсмографа
Землетрясение – нарушение баланса между Инь и Ян В древние времена считалось, что землетрясения – очень недобрый знак и гнев небес. В древней китайской философии даже было придумано специальное ученье, которое разбирало по косточкам баланс между двумя силами Инь и Ян. Естественно, эта наука не могла обойтись без объяснения такого феномена, как землетрясение. По мнению китайцев того времени, земля сотрясается не просто так, а из-за глобального нарушения баланса.
Почему иногда случаются подземные толчки, сила которых может привести к катастрофе? Все списывалось на неправильные решения китайских правителей. Увеличились налоги? Небеса накажут Китай землетрясением! Развязана война? Жди беды! Большой процент землетрясений, которые происходили тогда, были скрупулезно описаны. Историки считали важным писать обо всем, что творилось в такой неблагоприятный день.
Благодаря исследованиям Чжан Хэна было установлено, что землетрясения - естественное явление, узнать о котором можно заранее. Для этой цели он и создал сейсмограф.
Принцип работы первого китайского сейсмографа
Схема, по которой работал аппарат была следующей:- Когда начиналось землетрясение, первые толчки земли заставляли детектор трястись.
- При этом, шарик, который был помещен внутрь дракона, начинал двигаться.
- Затем он падал из пасти мифической рептилии прямо в рот жабы.
Принцип работы китайского сейсмографа
Во время падения шарика раздавался характерный лязгающий звук. Удивительно, но первый сейсмограф указывал даже направление, в котором находился эпицентр землетрясения (для этого на приборе были прикреплены дополнительные драконы). К примеру, если шар выпал из дракона с восточной части прибора, значит, беды нужно ждать на западе.
Первый сейсмограф - не только научный, но и художественный артефакт. Почему в его конструкцию входят именно драконы и жабы? Они являются философским символом времени. Соответственно, драконы – это Инь, а жабы – Ян. Взаимодействие между ними символизируют баланс между «верхом» и «низом». Даже с учетом всех научных открытий, Чжан Хэн не забывал вплести в свое изобретение традиционные верования.
Судьба-злодейка
Судьба многих древних деятелей науки была не самой радужной (некоторых даже на кострах сжигали за убеждения). Действительно, одно дело изобрести то, что прославит тебя на века, а другое – сделать так, чтобы тебя оценили современники. Даже Чжан Хэн не смог избежать скепсиса во время демонстрации сейсмографа императору Шунь Ян Цзя. Придворные отнеслись к изобретению ученого с большим недоверием.Скепсис немного развеялся в 138 году н.э., когда сейсмограф Чжан Хэна зафиксировал землетрясение в районе Лунси. Но даже после доказательства того, что аппарат в полевых условиях работает успешно, большинство побаивалось Чжан Хэна. Да, древние китайцы не лишены суеверий.
Китайский сейсмограф
Точная копия устройства
Оригинальный сейсмограф уже давно канул в Лету. Тем не менее, китайские и иностранные ученые, которые исследовали труды Чжан Хэна, смогли реконструировать его изобретение. Последние испытания подтверждают: сейсмограф древнего китайца может обнаружить землетрясение с точностью, которая практически не уступает современному оборудованию. Китайский сейсмограф в музее
Сегодня воссозданный древний сейсмограф хранится в выставочном зале Музея истории Китая в городе Пекин.
XIX век
В Европе серьёзно изучать землетрясения начали значительно позже.В 1862 г. вышла в свет книга ирландского инженера Роберта Малета «Великое неаполитанское землетрясение 1857 г.: основные принципы сейсмологических наблюдений». Малет совершил экспедицию в Италию и составил карту пораженной территории, разделив ее на четыре зоны. Введенные Малетом зоны представляют собою первую, достаточно примитивную, шкалу интенсивности сотрясений. Но сейсмология как наука начала развиваться только с повсеместным появлением и внедрением в практику приборов для регистрации колебаний почвы, т. е. с появлением научной сейсмометрии.
В 1855 г. итальянец Луиджи Пальмиери изобрел сейсмограф, способный регистрировать удаленные землетрясения. Действовал он по такому принципу: при землетрясении ртуть проливалась из шарообразного объема в специальный контейнер в зависимости от направления колебаний. Индикатор контакта с контейнером останавливал часы, указывая точное время, и запускал запись колебаний земли на барабан.
В 1875 г. еще один итальянский ученый, Филиппо Секи, сконструировал сейсмограф, который включал часы в момент первого толчка и записывал первое колебание. Первая дошедшая до нас сейсмическая запись сделана именно с помощью этого прибора в 1887 г. После этого начался быстрый прогресс в области создания инструментов для регистрации колебаний почвы. В 1892 г. группа английских ученых, работавших в Японии, создала первый достаточно удобный в обращении прибор сейсмограф Джона Милна. Уже в 1900 г. функционировала мировая сеть из 40 сейсмостанций, оборудованных приборами Милна.
XX век
Первый сейсмограф современной конструкции изобрел русский ученый, князь Б. Голицын, который использовал преобразование механической энергии колебаний в электрический ток .Б. Голицын
Конструкция довольно проста: грузик подвешивается на вертикально или горизонтально расположенной пружине, а к другому концу груза крепится перо самописца.
Вращающаяся бумажная лента служит для записи колебаний груза. Чем сильнее толчок, тем дальше отклоняется перо и дольше колеблется пружина. Вертикальный груз позволяет регистрировать горизонтально направленные толчки, и наоборот, горизонтальный самописец записывает толчки в вертикальной плоскости. Как правило, горизонтальная запись ведется в двух направлениях: север–юг и запад-восток.
Заключение
Как правило, крупные землетрясения не возникают неожиданно. Им предшествуют серии мелких, почти незаметных толчков особого характера. Научившись предсказывать землетрясения, люди смогут избегать гибели из-за этих катаклизмов и минимизировать наносимый ими материальный ущерб.С глубокой древности одним из самых страшных стихийных бедствий являются землетрясения. Поверхность земли нами подсознательно воспринимается как нечто незыблемо прочное и твердое, основа, на которой стоит наше существование.
Если же эта основа начинает трястись, обрушивая каменные здания, изменяя русла рек и воздвигая горы на месте равнин – это очень страшно. Неудивительно, что люди пытались предсказать , чтобы успеть спастись, убежав из опасного района. Так и был создан сейсмограф.
Что такое сейсмограф?
Слово «сейсмограф» имеет греческое происхождение и образовано от двух слов: «seismos» — сотрясение, колебание, и «grapho» — писать, записывать. То есть, сейсмограф – это прибор, предназначенный записывать колебания земной коры.
Первый сейсмограф, упоминание о котором осталось в истории, был создан в Китае почти две тысячи лет назад. Ученый астроном Чжан Хен изготовил для китайского императора огромную двухметровую чашу из бронзы, стенки которой поддерживали восемь драконов. В пасти каждого из драконов лежал тяжелый шар.
Внутри чаши был подвешен маятник, который при подземном толчке ударял о стенку, заставляя пасть одного из драконов раскрыться и выронить шар, падавший прямо в рот одной из больших бронзовых жаб, сидящих вокруг чаши. По описанию, прибор мог регистрировать землетрясения, происходящие на расстоянии до 600 км от места, где был установлен.
Строго говоря, каждый из нас может сам изготовить простейший сейсмограф. Для этого нужно подвесить гирю с заостренным концом точно над ровной поверхностью. Любое колебание грунта заставит гирю колебаться. Если припудрить площадку под грузом порошком мела или мукой, то прочерченные острым концом гирьки полоски укажут силу и направление колебаний.
Правда, такой сейсмограф для жителя большого города, дом которого находится рядом с оживленной улицей, не годится. Проезжающие тяжелые грузовики то и дело будут колебать почву, вызывая микроколебания маятника.
Сейсмографы, используемые учеными
Первый сейсмограф современной конструкции изобрел русский ученый, князь Б. Голицын, который использовал преобразование механической энергии колебаний в электрический ток.
Конструкция довольно проста: грузик подвешивается на вертикально или горизонтально расположенной пружине, а к другому концу груза крепится перо самописца.
Вращающаяся бумажная лента служит для записи колебаний груза. Чем сильнее толчок, тем дальше отклоняется перо и дольше колеблется пружина. Вертикальный груз позволяет регистрировать горизонтально направленные толчки, и наоборот, горизонтальный самописец записывает толчки в вертикальной плоскости. Как правило, горизонтальная запись ведется в двух направлениях: север–юг и запад-восток.
Зачем нужны сейсмографы?
Записи сейсмографов необходимы для изучения закономерностей появления подземных толчков. Этим занимается наука, называемая сейсмологией. Наибольший интерес для сейсмологов представляют районы, расположенные в так называемых сейсмически активных местах – в зонах разломов земной коры. Там нередки и передвижения огромных пластов подземных пород – т.е. то, что обычно вызывает землетрясения.
Как правило, крупные землетрясения не возникают неожиданно. Им предшествуют серии мелких, почти незаметных толчков особого характера. Научившись предсказывать землетрясения, люди смогут избегать гибели из-за этих катаклизмов и минимизировать наносимый ими материальный ущерб.
 Использование методов и приемов триз в образовательной деятельности с детьми старшего дошкольного возраста Методы и приемы триз в школе
Использование методов и приемов триз в образовательной деятельности с детьми старшего дошкольного возраста Методы и приемы триз в школе Александр пушкин - борис годунов
Александр пушкин - борис годунов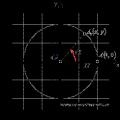 Прямоугольный треугольник: синус, косинус, тангенс, котангенс угла
Прямоугольный треугольник: синус, косинус, тангенс, котангенс угла