Akustilised emissioonid. Akustilise emissiooni meetodi kirjeldus Mittepurustava katse akustilise emissiooni meetod
VENEMAA GOSGOTEKHNADZOR
Kinnitatud
resolutsioon
Venemaa Gosgortekhnadzor
alates 11.11.96 nr 44
REEGLID
LAEVADE, SEADMETE, BOILERITE JA TEHNOLOOGILISE TORUJUHENDI AKUSTILISE-HEIDETE KONTROLLI KORRALDAMINE JA LÄBIVIIMINE
RD 03-131-97
Moskva
MTÜ OBT
2000
1. Üldsätted
1.1. Eesmärk ja ulatus
Anumate, seadmete, katelde ja protsessitorustike* akustiliste emissioonide seire korraldamise ja läbiviimise reeglid* kehtestavad nõuded, mis tagavad Venemaa Gosgortekhnadzori kontrollitavate objektide akustilise emissiooni seire korraldamise ja läbiviimise ning kehtivad akustiliste emissioonide seire teostamisel. ülerõhul töötavate anumate, seadmete, katelde ja protsessitorustike jaoks. Selle dokumendi kasutamine muudel objektidel on lubatud ainult kokkuleppel nende ohutu kasutamise üle järelevalvet teostavate ametiasutustega.
1.1.1. Põhisätted akustilise emissiooni meetodi kasutamiseks anumate, katelde, seadmete ja protsessitorustike seireks
Akustilise emissiooni (AE) meetod võimaldab tuvastada tekkivaid defekte, registreerides ja analüüsides kontrollitavates objektides plastilise deformatsiooni ja pragude kasvu ajal tekkivaid akustilisi laineid. Lisaks võimaldab AE meetod tuvastada töövedeliku (vedeliku või gaasi) väljavoolu kontrollitava objekti läbivate aukude kaudu. AE meetodi toodud omadused võimaldavad moodustada adekvaatse defektide klassifitseerimise süsteemi ja objekti tehnilise seisukorra hindamise kriteeriumid, lähtudes defekti tegelikust mõjust objektile.
AE-meetodi iseloomulikud tunnused, mis määravad selle võimalused, parameetrid ja kasutusvaldkonnad, on järgmised:
AE meetod tagab ainult tekkivate defektide tuvastamise ja registreerimise, mis võimaldab defekte klassifitseerida mitte suuruse, vaid nende ohtlikkuse astme järgi.
Tootmistingimustes võimaldab AE meetod tuvastada pragude kasvu kümnendiku millimeetri kaupa. Akustilise emissiooni seadmete maksimaalne tundlikkus arvutuslike hinnangute kohaselt on umbes 1
× 10 -6 mm 2 , mis vastab hüppe tuvastamisele 1 µm pikkuses praos väärtusega 1 µm, mis näitab väga suurt tundlikkust kasvudefektide suhtes.AE meetodi terviklikkuse omadus tagab kogu objekti juhtimise ühe või mitme objekti pinnale fikseeritult paigaldatud AE anduri abil.
AE meetod võimaldab jälgida erinevaid tehnoloogilisi protsesse ning materjalide omaduste ja oleku muutmise protsesse.
Defekti asukoht ja suund ei mõjuta defektide tuvastatavust.
AE meetodil on vähem piiranguid, mis on seotud konstruktsioonimaterjalide omaduste ja struktuuriga, kui teistel mittepurustavatel katsemeetoditel.
AE-meetodi üks omadus, mis selle kasutamist piirab, on mõnel juhul AE-signaalide mürast eraldamise raskus. See on tingitud asjaolust, et AE signaalid on müralaadsed, kuna AE on juhuslik impulssprotsess. Seega, kui AE signaalid on väikese amplituudiga, on kasuliku signaali eraldamine mürast keeruline ülesanne. Defekti arenedes, kui selle mõõtmed lähenevad kriitilisele väärtusele, suureneb AE signaalide amplituud ja nende genereerimise kiirus järsult, mis toob kaasa sellise AE allika tuvastamise tõenäosuse olulise suurenemise.
AE meetodit saab kasutada objektide kontrollimiseks nende valmistamise ajal – vastuvõtukatsetuste, perioodiliste tehniliste ülevaatuste ja töötamise ajal.
Akustiliste emissioonide testimise eesmärk on tuvastada, määrata koordinaadid ja jälgida (jälgida) AE allikaid, mis on seotud katkestustega anuma seina pinnal või mahus, keevisliitmikus ning valmistatud osades ja komponentides. Kui tehniliselt võimalik, on soovitatav hinnata AE allikaid muude mittepurustavate katsemeetodite abil. AE meetodit saab kasutada ka defekti tekkimise kiiruse hindamiseks, et katsed eelnevalt lõpetada ja toote hävimine ära hoida. AE registreerimine võimaldab kindlaks teha fistulite tekkimist läbi pragude ning tihendite, pistikute, liitmike ja äärikühenduste lekkeid.
Uuritavate objektide tehnilise seisukorra akustilise emissiooni monitooringut teostatakse ainult siis, kui konstruktsioonis tekib pingeseisund, mis käivitab objekti materjalis AE allikate töö. Selleks rakendatakse objektile jõu, rõhu, temperatuurivälja jms koormust. Koormustüübi valiku määrab objekti projekt ja selle töötingimused ning katsete iseloom.
1.1.2. Akustilise emissiooni katsemeetodi rakendamise skeemid
1.1.2.1. Teostatakse objekti akustilise emissiooni testimine. Kui AE allikad tuvastatakse nende asukohas, kasutatakse kontrollimisel üht traditsioonilist mittepurustava testimise meetodit - ultraheli (USA), kiirgus-, magnet- (MPD), kapillaar- (CD) ja muud, mis on ette nähtud regulatiivsetes ja tehnilistes dokumentides. . Seda skeemi soovitatakse kasutada töötavate objektide jälgimisel. Samal ajal väheneb traditsiooniliste mittepurustavate testimismeetodite maht, kuna traditsiooniliste meetodite kasutamise korral on vaja skaneerida üle kogu kontrollitava objekti pinna (mahu).
1.1.2.2. Katsetamine viiakse läbi ühe või mitme mittepurustava katsemeetodi abil. Kui avastatakse lubamatuid (vastavalt traditsiooniliste testimismeetodite standarditele) defekte või tekib kahtlus kasutatud mittepurustavate katsemeetodite usaldusväärsuses, kontrollitakse objekti AE meetodil. Lõplik otsus rajatise tööle lubamise või avastatud defektide parandamise kohta tehakse akustilise emissiooni kontrolli tulemuste põhjal.
1.1.2.3. Kui objektil on defekt, mis on tuvastatud mõne mittepurustava testimismeetodi abil, kasutatakse selle defekti arengu jälgimiseks AE meetodit. Sel juhul saab kasutada ökonoomset juhtimissüsteemi versiooni, kasutades akustilise emissiooni seadmete ühe- või väikese kanaliga konfiguratsiooni.
1.1.2.4. AE meetodit, vastavalt Surveanumate projekteerimise ja ohutu kasutamise reeglitele, kasutatakse objekti pneumaatilisel testimisel katsetamise ohutust suurendava kaasneva meetodina. Sel juhul on akustilise emissiooni kontrolli kasutamise eesmärk vältida katastroofilise hävingu võimalust. Objektide hüdrotestimisel on soovitatav kasutada kaasneva meetodina AE meetodit.
1.1.2.5. AE meetodi abil saab hinnata jääkressurssi ja lahendada küsimust objekti edasise ekspluateerimise võimalikkuse kohta. Ressursi hindamine toimub spetsiaalselt välja töötatud metoodika abil, mis on kokku lepitud Venemaa Gosgortekhnadzoriga. Veelgi enam, tulemuste usaldusväärsus sõltub kahjustuste kujunemise mudelite ja kontrollitava objekti materjali seisukorra a priori teabe mahust ja kvaliteedist.
1.1.3. Akustilise emissiooni meetodi rakendamise kord
1.1.3.1. Akustilise emissiooni kontrollimist teostatakse kõigil juhtudel, kui see on ette nähtud rajatise ohutuseeskirjade või tehnilise dokumentatsiooniga.
1.1.3.2. Akustiliste emissioonide testimine viiakse läbi kõigil juhtudel, kui rajatise regulatiivsed ja tehnilised dokumendid näevad ette mittepurustavate katsete (ultrahelikatse, radiograafia, MTD, CD ja muud mittepurustavad katsemeetodid), kuid tehnilistel või muudel põhjustel neid meetodeid kasutades on mittepurustavate katsete tegemine keeruline või võimatu.
1.1.3.3. Lubatud on kasutada akustilise emissiooni kontrolli iseseisvalt, samuti punktis 1.1.3.2 loetletud asemel. mittepurustavad katsemeetodid kokkuleppel Venemaa Gosgortekhnadzoriga.
1.2. Kontrolliobjektid
See dokument kehtib mahtuvuslike, kolonnide, reaktorite, keemia-, naftakeemia- ja naftatöötlemistööstuse soojusvahetusseadmete, isotermiliste hoidlate, rõhu all olevate veeldatud süsivesinikgaaside hoidlate, naftasaaduste ja agressiivsete vedelike reservuaaride, ammoniaagi jahutusseadmete, anumate kohta , katlad, seadmed, auru ja kuuma vee tootmistorustikud ja nende elemendid.
2. Nõuded organisatsioonile
teosed, esinejad ja tellimus
ettevalmistus akustika esitamiseks
heitgaaside kontroll
2.1. Kontrolli korraldus
Akustilise emissiooni testimise ettevalmistamisel ja läbiviimisel osalevad nii töövõtja kui ka tellija. Oluliseks teguriks, mis mõjutab akustiliste emissioonide kontrolli tulemusi, on selle rakendamisele vahetult eelnenud meetmed. Tehakse järgmised toimingud:
2.1.1. Pärast tellijalt ametliku avalduse saamist viib töövõtja esindaja kontrolli objektiga läbi eeltutvuse, et uurida kontrolli teostamise tehnilist teostatavust. Selles etapis lahendatakse juhtimistüübi küsimus: objekti akustilise emissiooni kontroll võib olla ühekordne, konstantne perioodiline kaasaskantavate seadmete abil ja püsiv statsionaarseid seadmeid kasutades (seire).
2.1.2. Pärast akustiliste emissioonide testimise läbiviimise lepingu vormistamist esitab tellija töövõtjale kogu testimise läbiviimiseks vajaliku katseobjekti projekti- ja tehnilise dokumentatsiooni koos tegelike tingimuste ja töörežiimidega.
2.1.3. Pärast rajatise dokumentatsiooniga tutvumist koostab töövõtja rajatise akustiliste emissioonide kontrolli tööprogrammi*. Tööprogrammi kinnitab kliendiettevõtte vastutav ametnik. See peab olema ettevõtte peainsener (tehniline direktor) või teda asendav isik.
______________
Tööprogramm peab kajastama tellija ettevõtte poolt akustiliste emissioonide testimise ettevalmistamisel läbiviidavaid tegevusi, tööde teostamise korda, tuues välja iga töös osaleja kohustused nii töövõtja kui ka töövõtja poolt. kliendist. Tööprogramm peab sisaldama organisatsioonilisi ja tehnilisi meetmeid, et tagada akustiliste emissioonide kontrolli edukas rakendamine. Tööprogramm peaks sisaldama järgmisi tegevusi:
akustilise emissiooni seadmete paigutamise ruumi esitus (vajadusel). Temperatuur ruumis peab olema vähemalt 18 °C, see peab olema varustatud toiteallikaga 220 V ja võimsusega vähemalt 10 kW;
juurdepääsu tagamine AE muundurite paigalduskohtadele juhtimisobjektil; Kliendil tuleb vajadusel varustada tõstemehhanismid, paigaldada tellingud, valmistada ja paigaldada pistikud, eraldada personal abitöödeks, sh akende väljalõikamiseks soojusisolatsioonis ja pinna puhastamisel AE muundurite paigalduskohtades (pinna puhtus ei tohi olla halvem kui Rz40); töövõtja peab akustilise emissiooni kontrolli ajaks eemaldama kontrollitavast objektist kõik remonditöölised, peatama tööd lähedalasuvate objektide juures jne;
objekti koormuse muutuste tagamine vastavalt töövõtja koostatud laadimisgraafikule;
kahepoolse suhtluse tagamine juhtimist teostava personali ja koormusvahetusi teostava operatiivpersonali vahel;
ohutusalase koolituse läbiviimine ja akustiliste emissioonide testimist teostavate spetsialistide varustamine isikukaitsevahendite ja eririietusega.
Meetmed tööde ohutuks läbiviimiseks teostab kliendiettevõte.
2.2. Juhtobjekti eeluuring
Enne akustiliste emissioonide testimist peab töövõtja hoolikalt uurima kontrolliobjekti, et saada andmeid selle objekti akustilise emissiooni testimise spetsiifilise tehnoloogia väljatöötamiseks. Tööprogrammi kuuluv “Objektijuhtimise tehnoloogia”* tuleb välja töötada käesoleva dokumendi ja juhtimisobjekti uurimisel saadud andmete alusel. Juhtimistehnoloogia tuleb esitada kontrolliaruande dokumentatsioonis.
Juhtimistehnoloogia väljatöötamisel on vaja järgmisi andmeid:
2.2.1. Materjali ja juhitava objekti akustilised omadused, sealhulgas akustilise emissiooni testimise läbiviimiseks vajalikud kiiruse ja laine sumbumise koefitsiendid ning materjalide impedantsid.
2.2.2. Akustilise emissiooni testimiseks vajaliku objekti materjali omadused.
2.2.3. Objekti kui akustilise kanali parameetrid.
Akustilised ja akustilised-emissiooni parameetrid saadakse katseobjekti eeluuringu käigus või kasutades tehnika- ja teaduskirjandusest teadaolevaid andmeid.
Saadud andmete põhjal töötatakse välja metoodilised meetodid objekti seireks, samuti töötatakse välja (või valitakse juba olemasolevate süsteemide ja kriteeriumide hulgast) süsteem AE allikate klassifitseerimiseks ja seiretulemuste hindamise kriteeriumid. AE allikate klassifikatsioonisüsteemi ja hindamiskriteeriumide valik on soovitatav kooskõlastada Venemaa Riikliku Tehnilise Järelevalve Ameti poolt akrediteeritud spetsialiseeritud ekspertorganisatsiooniga.
2.2.4. Juhtimistehnoloogia lepitakse kliendiga kokku enne testimist, et tellija saaks vajalikud ettevalmistustööd lõpule viia.
Juhtimistehnoloogia peab sisaldama järgmist teavet:
a) kontrollitava objekti materjal ja disain, sealhulgas mõõtmed ja kuju, ladustatava (töötava) toote tüüp;
b) andmed müraparameetrite kohta;
c) AE muundurite tüüp ja parameetrid, nende tootja, kalibreerimisinfo;
d) AE muundurite kinnitusviis;
e) kontaktkandja;
f) rajatise puhastamine pärast ülevaatust;
g) AE muundurite paigutus;
h) AE seadme tüüp, selle parameetrid;
i) akustilise emissiooni seadmete süsteemi ja kalibreerimise tulemuste kirjeldus;
j) registreeritud andmed ja registreerimisviisid;
k) AE allikate klassifitseerimise süsteem ja kontrolli tulemuste põhjal kontrollitava objekti seisundi hindamise kriteeriumid;
l) operaatori kvalifikatsioon.
Andmed kontrolliobjekti ja kontrolli peamiste parameetrite kohta kantakse protokolli akustilise emissiooni kontrolli () tulemuste põhjal.
Kirjeldage täielikult hüdro- (pneumaatilise) katsemenetlust; Esitage koormuse ja temperatuuri muutuste graafikud aja jooksul.
2.2.5. Klient korraldab vastavalt Juhtimistehnoloogiale laadimissüsteemi ettevalmistamise, loob vajalikud katsekeskkonna varud (inertgaas, vesi jne), lahendab laadimisseadmete, tõstemehhanismide ettevalmistamise jm ettevalmistustööd. määratletud juhtimistehnoloogias. Eelkoormatud või koormuse all olevate objektide puhul tuleb rõhku ja/või koormusi vähendada etteantud tasemeni. Alandatud rõhu all hoidmise aeg tuleks määrata eelnevalt saadud andmete põhjal.
Enne töös oleva objekti testimist on kohustuslik omada teavet:
maksimaalne töö (töö) rõhk või koormus viimase aasta jooksul.
katserõhk.
2.2.6. Kontrolltööde tegemisel annab tellija töövõtja käsutusse töötajate meeskonna, kes tagab tööde teostamise. Tingimused, mille kohaselt töövõtja kaasab tellija personali akustiliste emissioonide kontrollimise abitöödele, määratakse kindlaks lepinguga.
2.3. Nõuded ettevõtetele ja personalile,
akustilise emissiooni testimise läbiviimine
Objektide AE testimist viivad läbi ettenähtud korras sertifitseeritud mittepurustavate katselaborid.
(Muudetud väljaanne, muudatus nr 1)
II või III kvalifikatsioonitasemega spetsialistil on õigus anda järeldusotsus kontrolli tulemuste kohta.
Akustiliste emissioonide testimist teostavatele ettevõtetele kehtivad mitmed nõuded, mis peavad tagama tööde tegemise kõrgel tehnilisel tasemel.
Ettevõttel peab olema:
Venemaa Gosgortekhnadzori litsents akustiliste emissioonide kontrollimise tööde tegemiseks;
kalibreeritud juhtimisvahendid (AE muundurid ja akustilise emissiooni seadmed);
sertifitseeritud, kvalifitseeritud personal.
Soovitatav on omada pakett dokumente, mis kinnitavad teostava ettevõtte professionaalset taset, andmed kvaliteedisüsteemi kohta (Kvaliteedikäsiraamat), teave varasemate tööde kohta tööstusrajatiste kontrollimisel, kontrollitavate objektide ja akustilist emissiooni saanud ettevõtete nimekiri. kontrolliteenused.
Töövõtja valmisolekuks akustiliste emissioonide testimise tööde tegemiseks on vajalik tingimus, et tal on kontrollitava objekti jälgimiseks vajalik Tehnoloogia.
3. Nõuded riistvarale ja seadmetele
Akustiliste emissioonide testimisel kasutatavate seadmete ja seadmete hulka kuuluvad AE andurid koos kinnitusseadmete ja materjalidega, et tagada akustiline side katseobjektiga; AE signaali simulaatorid; Elektroonilised seadmed, mis on kavandatud AE-signaalide võimendamiseks ja töötlemiseks; Arvutusvahendid kontrollitulemuste töötlemiseks ja esitamiseks, sh tarkvara; tähendab, mis tagab kontrollitava objekti laadimise.
3.1. AE muundurid
AE muundurid määravad juhtimistundlikkuse ja töösageduse vahemiku. Töösagedus tuleks valida lähtudes müratingimustest ja objekti akustilisest sumbumisest. Anumate, katelde ja seadmete jälgimiseks on soovitatav kasutada vahemikku 100-500 kHz. Protsessi torujuhtmete jälgimisel tuleks kasutada madalamat sagedusvahemikku 20-60 kHz. Arvestada tuleb sellega, et objektide jälgimisel madalamatel sagedustel, kõrge tase kõrvaline mehaaniline müra. Vahemikus üle 500 kHz on elastsuslainete sumbumine struktuuris suurem mõju.
Kasutatavad AE-d peavad olema stabiilsed temperatuurivahemikus, milles objekte jälgitakse. Nende elektroakustiline muundamise koefitsient ei tohiks selles temperatuurivahemikus muutuda rohkem kui 3 dB. Objekti jälgimisel kasutatavate muundurite partii teisenduskoefitsientide jaotus ei tohiks ületada 3 dB. Soovitatav on kasutada valdavalt resonantse AE-sid.
AE muundurid peavad olema mürakindlad, mis saavutatakse aktsepteeritud mürakaitsemeetodite, samuti diferentsiaalahelate kasutamisega.
AE-andurid tuleb objekti külge kinnitada mehaaniliste seadmete, magnethoidikute või liimi abil. Seadmed muundurite paigaldamiseks rajatisse valitakse selle konstruktsiooniomadusi arvesse võttes. Need võivad olla eemaldatavad (magnethoidjad, klambrid, klambrid jne) või püsivalt paigaldatud sulgude kujul.
Eelvõimendi asetatakse AE-muunduri lähedusse või otse selle korpusesse. AE-muundurit eelvõimendiga ühendava signaalikaabli pikkus ei tohiks reeglina ületada 2 m, kaablil peab olema elektromagnetiliste häirete eest kaitsev varjestus. Eelvõimendit seadmega ühendava kaabli maksimaalne pikkus ei tohiks reeglina ületada 150 m. Signaalikadu selles kaablis ei tohi ületada 1 dB 30 m pikkuse kohta, elektriline mahtuvus ei tohi ületada 30 pF/m .
AE muundur paigaldatakse kas otse anuma pinnale või lainejuhi abil. Soovitatav on kasutada mittesuunalisi andureid. Lineaarsete objektide (torujuhtmete) jälgimisel või teatud tsoonide jälgimisel on lubatud kasutada suunavaid AE andureid. Paksuseinaliste esemete jaoks (kaasas
l<< t» 10 L, Kus t- seina paksus,l- lainepikkus töösagedusel, L- AE-muundurite vaheline kaugus), on soovitatav kasutada pinnalainete piesoelektrilisi muundureid.AE-anduri paigaldamisel katseobjektile peab akustiline kontaktmeedium tagama tõhusa akustilise side AE-anduri ja objekti vahel. Signaali amplituudi vähenemine objektilt AE andurile ei tohiks ületada 6-12 dB, mis saavutatakse minimaalse sumbuvuse ja akustilise takistusega kontaktmeediumi kasutamisega, mis soodustab AE anduri ja AE anduri akustilist sobitamist. objekti. Kontaktainel ei tohiks olla kontrollitavale objektile soovimatut mõju (nt põhjustada korrosiooni). Kontaktaine peab tagama usaldusväärse akustilise kontakti kogu katseperioodi jooksul kontrollitava objekti temperatuuril. Kontaktkeskkonnana võite kasutada epoksüvaiku ilma kõvendita, masinaõli, glütseriini ja muid vedelaid aineid. Katseobjekti pind AE-muunduri paigalduskohas puhastatakse tasemeni, mis pole halvem kui
Rz 40.Pärast AE muunduri paigaldamist juhtobjektile kontrollitakse nende jõudlust AE simulaatorite abil. AE-signaalide simulaatorina tuleks kasutada piesoelektrilist muundurit, mida ergastavad generaatori elektriimpulssid. Simulatsiooniimpulsi sagedusvahemik peab vastama juhtimissüsteemi sagedusvahemikule.
Muundur-simulaatorit erutav generaator peab vastama järgmistele nõuetele:
impulsi kordussagedus - 1-1000 Hz;
genereeritud impulsside amplituud on erinev ja peaks tagama amplituudi muutuse juhtimissüsteemi muundurite väljundis (arvestades sumbumist) vahemikus 10-30 mV;
erutava elektriimpulsi kestus ei tohiks ületada 0,1-0,2 μs.
AE signaalide simulaatorina on võimalik kasutada ka Su-Nielseni allikat [0,3-0,5 mm läbimõõduga grafiitvarda murd, kõvadus 2T (2H)].
Järelevalve teostamisel tuleb kasutatavad töötavad AE andurid kalibreerida võrdlusandurite abil.
Kalibreerimisel teostatakse standardsete mõõteriistade abil standardsete mõõteriistade abil AE etalonmuunduri elektroakustilise muundusteguri määramine, mõõtes tahke keha pinna dünaamilise nihke amplituudi ja impulssreaktsiooni amplituudi. akrediteeritud Venemaa riikliku standardi järgi.
Töötavate AE-andurite kalibreerimist viivad läbi Venemaa Gosstandarti poolt akrediteeritud sõltumatud laborid, kasutades standardseid AE-andureid. Töötavate AE-muundurite põhiparameetrite määramise teevad AE-muundurite omanikud standardsete AE-muundurite abil. AE võrdlusandureid tuleks kalibreerida kord aastas. Töötavate AE-muundurite põhiparameetrite kindlaksmääramine tuleks läbi viia enne iga kontrollimist, kuid vähemalt kord aastas. Tulemused kantakse AE muunduri passi.
3.2. Akustilise emissiooni seadmed
AE registreerimiseks suuremahuliste objektide testimisel tuleks kasutada akustilise kiirguse seadmeid mitme kanaliga süsteemide kujul, mis võimaldavad määrata signaaliallikate koordinaate ja AE karakteristikuid, registreerides samal ajal laadimisparameetreid (rõhk, temperatuur jne. ).
Mitmekanaliline akustilise emissiooni süsteem peab sisaldama:
eelvõimendite komplekt;
kaabelliinid;
plokid AE signaalide eeltöötluseks ja teisendamiseks;
Arvuti koos vajaliku matemaatilise tarkvaraga;
teabe kuvamise vahendid;
süsteemi kalibreerimisplokid.
Akustilise emissiooni süsteem võib olla statsionaarne või mobiilne. Lihtsa konfiguratsiooniga objektide juhtimiseks või juhtudel, kui defektide asukohta ei nõuta, on lubatud kasutada vähem keerukaid seadmeid, s.t. ühe kanaliga seade(d) või mitme kanaliga süsteem tsooni juhtimisrežiimis.
Akustilise emissiooni süsteem peab tagama nii teabe töötöötluse ja kuvamise reaalajas kui ka töötlemise, kuvamise ja väljundi välisseadmetele katse käigus kogunenud andmete dokumenteerimiseks pärast katse lõppu.
Selline teave hõlmab järgmist:
AE-impulsi registreerinud AE-muundurite rühmade arv või PAE-de arv;
iga registreeritud AE impulsi koordinaadid (see pole tsooni juhtimisrežiimis vajalik);
AE impulsi amplituud (akustilise emissiooni protsessi amplituudijaotus);
akustiliste emissiooniimpulsside energia, kas "MARSE" (alaldatud signaali mähisjoone mõõdetud pindala - signaali mähisjoone all olev mõõdetud pindala) või muu energia parameeter;
heitkoguste arv (signaal ületab diskrimineerimistaseme);
signaali ajastuse omadused;
koormuse parameetrid, mille juures AE impulss registreeriti (rõhk, deformatsioon või temperatuur);
impulsi registreerimise aeg;
signaali saabumisaegade erinevuse väärtused (tsooni juhtimisrežiimis pole see vajalik);
Akustiliste emissioonisüsteemidele esitatakse järgmised üldised tehnilised nõuded, mida kinnitab seadmete kalibreerimistunnistus:
töösagedusvahemik 10 kuni 500 kHz;
ebaühtlased amplituud-sageduskarakteristikud sagedusvahemikus kuni ±3 dB;
signaali nõrgenemine väljaspool tööpiirkonda häire korral oktavi võrra piirsageduste suhtes vähemalt 30 dB;
võimendustee omamüra pinge efektiivne väärtus ei ole suurem kui 5 μV;
eelvõimendi võimendus 20-60 dB;
peavõimendi võimendus 0-40 dB astmelise reguleerimisega iga 1 dB järel;
eelvõimendi amplituudi dünaamiline ulatus ei ole väiksem kui 70 dB;
AE signaalide amplituudi mõõtmise dünaamiline ulatus ei ole väiksem kui 60 dB;
Akustilise emissiooni süsteem peab tagama võimaluse võrdsustada mõõtekanalite tundlikkust nii, et erinevused ei ületaks ±1 dB.
Akustilise emissiooni süsteem peab tagama valesündmuste tagasilükkamise, mida rakendatakse nii riist- kui ka tarkvara tasemel.
Programmi süsteemiosa peaks pakkuma lihtsat suhtlemist operaatori ja arvuti vahel, sisestades interaktiivses töötlusrežiimis töökorraldusi ja muutes parameetreid.
Akustilise emissiooni seadmete peamised parameetrid ja nende töörežiimid registreeritakse protokollis (). Kui need testimise käigus muutuvad, tuleb põhjus ära näidata.
4. Kontrolli läbiviimine
Objekte tuleb juhtida nende tööasendis. Pärast ettevalmistustööd tehakse otsejuhtimistööd, mis algavad AE muundurite paigaldamisega objektile.
4.1. Akustilise emissiooni andurite paigaldamine
Iga AE andur tuleb paigaldada otse objekti pinnale või kasutada sobivat lainejuhti. Tuleb arvestada, et värvi- ja kaitsekatete, samuti objekti pinna kumeruse ja pinna ebatasasuste olemasolul kontakttsoonis on võimalik AE signaali amplituudi vähenemine ja selle kuju moonutamine. Kui AE-signaali amplituudi langus ületab 6 dB, tuleb AE-muunduri paigalduskohas oleva objekti pind tõrgeteta värvist või pinnakattest puhastada.
Samuti on vaja ette näha signaalikaabli ja eelvõimendi kinnitamine, et vältida akustilise kontakti kadumist ja AE-muunduri mehaanilist koormust.
AE-muundurite paigutuse ja antennirühmade arvu määrab objekti konfiguratsioon ja AE-muundurite maksimaalne vahekaugus, mis on seotud signaali sumbumise ja koordinaatide määramise täpsusega. Antennirühmad ja üksikud AE muundurid tsooni asukoha jaoks tuleks paigaldada nii, et objekti kriitilised alad, keevisõmblused, kõrgepingetsoonid, torud, remonditavad alad jne. sisenes kontrolltsooni. Täiendava sumbumisega tuleb arvestada keevisõmblustes ja piirkondades, kus toimub objekti seina paksuse muutus. AE muundurite paigutus on toodud Control Technologies'is (juhtkaardid).
Sõltuvalt konfiguratsioonist tuleks objekt jagada eraldi elementaarseteks osadeks: lineaarne, tasane, silindriline, sfääriline. Iga sektsiooni jaoks valitakse sobiv AE-muundurite paigutus. Lisaks koordinaatide määramiseks kasutatavatele andurite põhirühmadele võivad rajatises paikneda ka abi- (blokeerivad) rühmad tuvastatud müraallikate tsooni ruumiliseks valimiseks.
AE andurite paigutus peab tagama kogu kontrollitava objekti pinna jälgimise. Mõnel juhul on kokkuleppel kliendiga lubatud AE muundureid paigutada ainult nendesse objekti piirkondadesse, mida peetakse oluliseks. Kui kogu rajatise kontrolltsoonide 100% katvus ei ole tagatud, tuleb see märkida kontrolliaruandesse koos selle skeemi kasutamise põhjendusega.
Akustilise emissiooni allikate koordinaadid arvutatakse signaalide saabumisaja erinevusest juhitava objekti pinnal asuvatele AE anduritele.
Mitme kanaliga asukoha puhul valitakse AE-andurite vaheline kaugus selliselt, et signaal AE-simulaatorist (pliiatsikatkestus), mis asub mis tahes kontrollitavas piirkonnas, tuvastatakse arvutamiseks vajaliku minimaalse andurite arvuga. koordinaadid.
AE-muundurite vahelise kauguse valimiseks mõõdetakse sumbumist ja valitakse objekti esinduslik osa ilma harutorude, läbikäikudeta jne, paigaldatakse AE-andur ja liigutatakse AE-simulaatorit (iga 0,5 m) mööda joont. suund AE muundurist 3 m kaugusele AE simulaatorina on soovitatav kasutada piesoelektrilist muundurit või katkist pliiatsi juhet (Su-Nielseni simulaator) läbimõõduga 0,3-0,5 mm kõvadusega 2H (2T), kui varda kaldenurk pinna suhtes on ligikaudu 30°, pikendatakse varda 2,5 mm võrra.
Tsooni asukoha kasutamisel on AE andurite vaheline kaugus seatud selliselt, et katkise pliiatsi AE signaal (või signaal teisest AE simulaatorist) salvestatakse kontrollitavas tsoonis vähemalt ühe AE anduriga ja sellel on amplituud. mitte vähem kui määratud. Reeglina ei tohiks AE-simulaatori amplituudide erinevus, kui see asub AE-muunduri lähedal ja tsooni servas, ületada 20 dB. Maksimaalne kaugus AE-muundurite vahel ei tohiks ületada 1,5-kordset läviväärtust. Viimast määratletakse kui kaugust, mille juures AE simulaatori signaali amplituud (pliiatsijuhtme katkemine) on võrdne lävipingega.
Elastsete lainete suure sumbumisega objektide jälgimisel on soovitatav kasutada kahte töösagedust - madalat vahemikus 20-60 kHz ja kõrgemat vahemikus 100-500 kHz. Sel juhul kasutatakse AE allikate tuvastamiseks ja hindamiseks kõrgsageduslikke kanaleid. Madala sagedusega kanaleid tuleks kasutada nende AE allikate tuvastamiseks, mis võivad kõrgetel sagedustel AE signaalide suure nõrgenemise tõttu ära jääda. Kui madalal sagedusel (vastab II või III klassi allikale) tuvastatakse märkimisväärne aktiivsus ja kõrgsageduskanalites registreerimist ei toimu, tuleb kõrgsageduslik PAE lähtestada ja seiret korrata.
AE allikate koordinaatide arvutamiseks kasutatav helikiiruse mõõtmine toimub järgmiselt.
AE simulaator asub väljaspool AE andurite gruppe AE andureid ühendaval liinil, ühest neist 10-20 cm kaugusel. Tehes mitu mõõtmist (vähemalt 5) erinevate AE-muundurite paaride jaoks, määratakse keskmine levimisaeg. Kasutades seda ja teadaolevat kaugust AE muundurite vahel, arvutatakse AE signaalide levimiskiirus.
4.2. Akustilise emissiooni toimimise kontrollimine
seadmete ja kanalite kalibreerimine
Akustilise emissiooni süsteemi funktsionaalsust kontrollitakse kohe pärast AE andurite paigaldamist juhitavale objektile, samuti pärast testimist, ergastades helisignaali AE simulaatoriga, mis asub igast AE andurist teatud kaugusel. AE signaali salvestatud amplituudi kõrvalekalle ei tohiks ületada 3 dB keskmine suurus kõigi kanalite jaoks. Kui määratud väärtust ületatakse, tuleb põhjus kõrvaldada, vastasel juhul tuleb uuesti kontrollida.
Erinevate AE-muundurite rühmade tundlikkuse tase võib erineda. Sel juhul peab kontrollprotokollis olema märge ja aktis põhjendus. Seiretulemuste hindamisel on vaja arvestada kanali tundlikkuse levikut.
Kanali võimenduse ja amplituudi eristamise lävi valitakse, võttes arvesse AE signaalide eeldatavat amplituudivahemikku. Samas hoolitsetakse selle eest, et AE signaalide edastamine oleks moonutusteta ning häirete emissiooni sagedus kanalis ei ületaks keskmiselt ühte 100 s kohta. Läviväärtust, AE signaali emissioonide arvu, energiat, MARSE-i, amplituudi ja muid vajalikke omadusi kontrollitakse Juhttehnoloogias salvestatud tehnoloogia abil.
Objektide hüdrotestimise korral tehakse kõik seadmete seadistamise tööd pärast seda, kui objektid on täielikult veega täidetud.
4.3. Objekti laadimine
Peale ettevalmistus- ja reguleerimistööde lõpetamist toimub objekti laadimine. Akustilise emissiooni testimine toimub objekti laadimise protsessis teatud eelvalitud väärtuseni ja koormuse säilitamise protsessis kindlaksmääratud tasemel.
Juhtobjekti siserõhuga koormamisel peab selle maksimaalne väärtus (katserõhk) ületama lubatud töörõhku (töökoormust) mitte vähem kui 5-10%, kuid mitte ületama katserõhku, mis on määratud valemiga:
![]()
Kus R- anuma arvutuslik rõhk, MPa (kgf/cm2); - vastavalt anuma või selle elementide materjalile lubatud pinged 20 °C ja arvestustemperatuuri juures, MPa (kgf/cm2); A= 1,25 – kõikidele laevadele, välja arvatud valatud laevadele; A= 1,5 - valatud anumate puhul (punktid 4.6.3. - 4.6.5).
Kui maksimaalne katserõhk on võrdne katserõhuga, ei tohiks töötavate objektide hoidmisaeg ületada 5 minutit (punkt 6.3.20 "Surveanumate projekteerimise ja ohutu kasutamise reeglid") ja toodetud esemete uuesti katsetamisel. valitakse vastavalt tabelile 4.3. (punkt 4.6.12. "Surveanumate projekteerimise ja ohutu kasutamise eeskirjad").
Tabel 4.3
|
Anuma seina paksus, mm |
Hoideaeg, min |
|
Kuni 50 |
|
|
Üle 50 kuni 100 |
|
|
Üle 100 |
|
|
Valatud ja mitmekihiliseks, sõltumata seina paksusest |
Kui maksimaalne katserõhk on katserõhust väiksem, peab vastvalminud esemete katsetamise aeg olema vähemalt 10 minutit.
Nafta, naftasaaduste ja muude vedelate ainete hoidmiseks mõeldud mahutite akustilise emissiooni monitooringu teostamisel peab maksimaalne koormuse väärtus võrdne R isp = 1,05 R ori.
Täitmiseks katsetatud objektide akustilise emissiooni testimise läbiviimisel peab maksimaalsel lubatud täitetasemel hoidmisaeg olema vähemalt kaks tundi.
Maksimaalse katserõhu määramisel tuleb arvesse võtta materjali omadusi, katseobjekti töötingimusi, temperatuuri ja selle koormuse ajalugu.
Laadimine toimub spetsiaalse varustuse abil, mis tagab koormuse tõusu - sisemise (välise) rõhu vastavalt etteantud graafikule, mis määrab laadimiskiiruse, objekti koormuse all hoidmise aja ja koormuse väärtused. Tüüpilise laadimisgraafiku näide on toodud viites. Lubatud on kõrvalekalded standardsest laadimisgraafikust, esitades aruandes vajaliku põhjenduse.
Objekti testid jagunevad esialgseteks ja töötavateks.
Esialgsed testid on suunatud:
kõigi seadmete funktsionaalsuse kontrollimine;
mürataseme selgitamine ja diskrimineerimisläve kohandamine;
pistikute ja täitekarbi tihendite kokkupressimine;
hõõrdumisega seotud akustilise kiirguse allikate identifitseerimine esemete, tugede, konstruktsiooni jäigastajate jms riputuskohtades (kinnituspunktides).
Eelkatsed tehakse tsüklilise koormuse korral vahemikus 0-0,25 R ori. Objektide puhul, millel pole kattekihte ja jäikusi, on laadimistsüklite arv vähemalt 2, teistel - vähemalt 5.
Laadimine töökatsetuse ajal on soovitatav teostada astmeliselt, rõhu hoidmise aegadega 0,58× R ori 0,75 × R ori 1.0 × R ori Ja R hispaania keel Vaheetappide hoidmise aeg peaks reeglina olema 10 minutit.
Objektide laadimine peaks toimuma sujuvalt kiirusega, mille juures ei teki häireid, mis ei ületa lubatud taset (vt.). Soovitatavad rõhutõusu määrad on järgmised:
R isp /60-R isp /20 [MPa/min].
Lubatud on teha katseid laadimiskiirusel, mis on väiksem kui ette nähtud. Sellistel juhtudel ei pruugi vahepealsed kokkupuuted olla vajalikud.
Suuremahuliste mahutite ja hoidlate akustilise emissiooni seire toimub seirerežiimis (pidev monitooring) või spetsiaalse programmi järgi. Iga sellise objekti laadimisprogramm koostatakse individuaalselt ja lepitakse kokku Venemaa Riikliku Tehnilise Järelevalve Ameti poolt akrediteeritud spetsialiseeritud ekspertorganisatsiooniga.
Laadimiskeskkonnana võib kasutada vett, objekti töövedelikku vedela keskkonna kujul (hüdrotest), aga ka gaasilist keskkonda (pneumotest).
Hüdrotestimise korral tuleb laadimisvedelik ette anda läbi toru, mis asub anuma alumises osas, anumat täitva vedeliku tasemest allpool.
Kontrollimisel tekkiva müra ja häirete taseme vähendamiseks tuleb peatada kõik kõrvalised tööd ülevaatusobjektil endal ja selle läheduses. Hooldusaladel ringi liikumine, sõidukite liikumine, keevitus- ja paigaldustööd ning läheduses olevate tõste- ja transpordimehhanismide kasutamine tuleks keelata.
Kaug- või suuremahuliste objektide ülevaatuse teostamisel on lubatud ülevaatus läbi viia etapiviisiliselt. Üksikute etappide vaheline intervall peab olema vähemalt 24 tundi Lubatud on kontrollida ainult osa objektist kokkuleppel tellijaga.
Katsetades äsja valmistatud anumaid, mis ei ole läbinud keevitusjärgset kuumtöötlust, on võimalik registreerida AE, mis on põhjustatud pingete ühtlustamisest ja ei ole seotud defektide tekkega. Seetõttu võetakse esimesel laadimisel reeglina arvesse ainult signaale, mille amplituud ületab lävitaset rohkem kui 20 dB ja särituse ajal salvestatud signaale. Kui esimese laadimise ajal tuvastatakse II või III klassi AE allikad või saadakse ebakindlaid tulemusi, tuleb anum laadida tõrgeteta teise töölaadimistsükliga, mille koormuse muutus on 50% kuni 100% katserõhust. AE allikate klassifikatsioonisüsteem on toodud.
Laadimisprotsessi käigus on lubatud muuta võimendusradade tundlikkust tehtud muudatuste momendi ja väärtuse kohustusliku registreerimisega ning akustilise emissiooni kontrolli protokollis toodud põhjendusega.
Katsed lõpetatakse varakult, kui salvestatud AE allikas jõuab IV klassi. Koguarvu, impulsi amplituudi, energia või MARSE kiire (eksponentsiaalne) suurenemine võib viidata pragude kiirenemisele, mis viib rikkeni. Objekt tuleb maha laadida, katse kas peatada või määrata AE allikas ja hinnata katsete jätkamise ohutust.
Rõhk ja temperatuur (kui see muutub) registreeritakse kogu koorma tõstmise ja vabastamise tsükli jooksul. Rõhku tuleb pidevalt jälgida täpsusega ±2% maksimaalsest katserõhust. Analoogmanomeetri skaala maksimaalne väärtus peab olema vähemalt 1,5 ja mitte rohkem kui 5 korda suurem katserõhust, digitaalseadme viga ei tohi ületada 1% katserõhust.
4.4. Müra analüüs
Peamine akustiliste emissioonide testimise tõhusust mõjutav tegur on müra. Objektide akustilise emissiooni testimisel tuleb arvestada, et peamised müraallikad on:
vedeliku pritsimine anumas selle täitmisel;
hüdrodünaamilised turbulentsed nähtused suurel laadimiskiirusel;
pumpade, mootorite ja muude mehaaniliste seadmete kasutamine;
elektromagnetiliste häirete mõju;
mõju keskkond(vihm, tuul jne).
Müra mõju vähendamiseks kontrollitulemustele meetmete võtmiseks on vaja müra liigiti eraldada. Sõltuvalt päritoluallikast jagatakse müra akustiliseks (mehaaniliseks) ja elektromagnetiliseks. Sõltuvalt mürasignaali tüübist jagatakse need impulss- ja pidevateks. Sõltuvalt allika asukohast jagatakse need välisteks ja sisemisteks. Enne testimist tuleb kõrvaldada kõik lekked kontrollitavas objektis ja laadimissüsteemis.
Minimaalne müratase, mis määrab AE-seadmete tundlikkuse, on seotud AE-muunduri sisemise soojusmüraga ja võimendi (eelvõimendi) sisendastmete müraga. Piesokeraamikast valmistatud tundliku elemendiga AE-muunduri sisemine termiline müra ei tohiks ületada 5 μV. Võimendi sisendastmete müratase ei tohiks ületada 6 dB. Seetõttu ei tohiks AE-seadmete sisemüra ületada 10 μV (U sha <10 мкВ), приведенных ко входу.
Pidev akustiline või elektromagnetiline müratase ( U w ) ei tohiks ületadaU sha +6 dB ( U w< U por = U sha + 6 dB). Siin U sellest ajast - lävipinge.
Kui see tingimus ei ole täidetud, tuleb mürataseme vähendamiseks võtta kasutusele kõik meetmed (tehnilised ja organisatsioonilised). Kui müra ei ole võimalik nõutava väärtuseni vähendada, tuleb akustiliste emissioonide testimine lõpetada. Kontrolli teostamine suurenenud müra tingimustes (st kui ebavõrdsusU w > U sha + 6 dB) on võimalik ainult siis, kui vajalike AE allikate tuvastamise võimalus on teaduslikult ja tehniliselt põhjendatud. Sel juhul võib seadmete lävitaseme väärtus ületada 20 µV, s.o.U aastast > U w >20 µV.
Impulssmüra (häirete) piirangud kehtestatakse katsete läbiviimise tingimuste alusel. Soovitatav on, et impulssmüra keskmine salvestussagedus ei ületaks 0,01 Hz (st.F pom < 0,01 Гц). При невозможности уменьшения частоты регистрации импульсных помех до требуемого значения необходимо прекратить проведение акустико-эмиссионного контроля. Проведение контроля в условиях повышенной частоты регистрации импульсных помех (т.е. при выполнении неравенства F pom > 0,01) on võimalik ainult siis, kui vajalike AE allikate kindlakstegemise võimalus on teaduslikult ja tehniliselt põhjendatud.
Elektromagnetiliste häirete mõju vähendatakse varjestuse, spetsiaalsete raadiotehniliste elementide (diferentsiaalandurid ja -võimendid, filtrid jne) kasutamisega, samuti seadmete piiramisega häirete ajaks.
Kogu müra tuleb tuvastada, minimeerida ja selle parameetrid registreerida. Peale seadmete seadistamist ja enne töötesti läbiviimist kontrollitakse mürafooni 15 minuti jooksul, mis peab olema alla kehtestatud lävetaseme. Kui müratase ületab läve, tuleb müraallikas kõrvaldada või katse peatada.
AE allikate asukoht tuleks määrata kindlaksmääratud (juhtimistehnoloogias) täpsusega kas mitme kanaliga asukohasüsteemi või tsoonijuhtimise abil. AE signaaliallikate koordinaatide määramine toimub tasapinnalise asukoha režiimis, st. Allika sügavust ei määrata.
Mitme kanaliga asukoha määramise täpsus peab olema vähemalt kaks seinapaksust või 5% AE-andurite vahelisest kaugusest, olenevalt sellest, kumb on suurem.
Vead koordinaatide arvutamisel määravad vead signaali muundurisse saabumise aja mõõtmisel. Veaallikad on:
viga ajavahemike mõõtmisel;
erinevus tegelike ja teoreetiliselt aktsepteeritud jaotusteede vahel;
anisotroopia olemasolu signaali levimise kiiruses;
signaali kuju muutumine läbi struktuuri levimise tagajärjel;
signaalide ajaline kattumine, samuti mitme allika tegevus;
registreerimine erinevat tüüpi lainemuundurite abil;
viga heli kiiruse mõõtmisel (seadistamisel);
viga AE andurite koordinaatide määramisel.
Kontrollitava ala suurus tsooni juhtimisel määratakse AE muundurit ümbritseva objekti pinna piiriga, mille puhul piirilt AE muundurisse mineva signaali sumbumine ei ületa 20 dB.
Enne objekti laadimist hinnatakse simulaatori abil viga koordinaatide määramisel. See paigaldatakse objekti valitud punkti ja koordinaatide määramise süsteemi näitu võrreldakse simulaatori tegelike koordinaatidega. Sel juhul varieerub simulatsioonisignaali amplituud eeldatavas vahemikus, mis on määratud katseobjekti eeluuringu tulemusel. Toimingut korratakse objekti struktuuri erinevate tsoonide jaoks. Juhul, kui koordinaatide määramise viga ei vasta määratud väärtusele, tuleks tuvastada ülaltoodud peamised vigade allikad ja reguleerida juhtimisparameetreid (muutused andurite asukoha konfiguratsioonis, andurite vaheline kaugus, jne) Kui pärast reguleerimist ületab viga määratud väärtuse, tuleb AE kontrolli teostamise võimalust põhjendada ja kajastada aruandes.
5. Andmete kogumine, töötlemine ja analüüs
Juhtimisprotsessi käigus kogutakse andmeid kiiresti ja töödeldakse. Seiresüsteem peab tagama IV klassile (katastroofiliselt aktiivne allikas) vastava AE allika registreerimise ja signaalimise reaalajas. Pärast objekti jälgimist toimub andmete hilisem töötlemine ja analüüs täies mahus.
Andmete kogumine toimub pärast AE signaalide parameetrite tuvastamist. Kui digitaalsalvestid on saadaval, salvestatakse AE signaalid protsessi hilisemaks analüüsiks.
Andmete töötlemise ja analüüsi määrab valitud AE allikate klassifikatsioonisüsteem ja kontrollitulemuste hindamise kriteeriumid. Kõik registreeritud AE signaalid jaotatakse AE allikateks sõltuvalt nende asukohast juhitavas objektis. Allikad klassifitseeritakse sõltuvalt nende parameetrite väärtustest.
AE allikaid hinnatakse etapiviisiliselt sõltuvalt laadimisrežiimist ja seirele kuluvast ajast. Iga etapp ei tohiks kesta kauem kui 4 tundi pidevat jälgimist. Kogu akustilise emissiooni kontrolli kestus ei ole reguleeritud.
Tsooni juhtimist kasutatakse juhtudel, kui AE allikate koordinaatide määramine on võimatu või ebaotstarbekas.
Selle lähenemisviisi kasutamiseks valmistatakse esmalt ette konkreetse kriteeriumi valimiseks ja rakendamiseks vajalik esialgne teave;
Andmetöötlus tuleks läbi viia arvutis, mis on kaasatud akustiliste heitekontrollisüsteemi.
Infotöötlusprogramm peab tagama AE signaaliallikate asukoha kindlaksmääramise signaalide AE muundurisse saabumise aja või amplituudi järgi ning kuvama nende asukoha AE allika tähistena asukohakaardil (ja ajal jälgimisprotsess – ekraanil).
Asukohakaardil on tuvastatud AE näidustuste suurenenud kontsentratsiooniga tsoonid (klastrid), mis koos moodustavad tervikliku pildi AE allikast.
Võrreldakse saadud tsoonide paiknemist ja objekti tehnoloogilist topoloogiat, et eraldada võimalikud mehaanilise müra allikad, mis ei ole seotud defektide tekkega, AE allikatest.
Teave AE indikatsioonide kontsentratsiooni tsoonide kohta salvestatakse ja töödeldakse sisseehitatud programmide abil, et koostada iga valitud tsooni jaoks esitatud graafikud ja klassifitseerida AE allikad.
6. Kontrollitulemuste hindamine
Pärast vastuvõetud signaalide töötlemist esitatakse seire tulemused tuvastatud ja klassifitseeritud AE allikate kujul.
Otsuse tegemisel akustilise emissiooni seire tulemuste põhjal kasutatakse andmeid, mis peavad sisaldama teavet kõigi AE allikate, nende klassifikatsiooni ja teavet AE allikate kohta, mille parameetrid ületavad lubatud normi.
AE allika lubatud taseme määrab teostaja konkreetse objekti akustilise emissiooni testimiseks valmistudes.
AE allikate klassifitseerimine toimub järgmiste signaaliparameetrite abil: summaarne arv, impulsside arv, amplituud (amplituudijaotus), energia (või energia parameeter), loenduskiirus, aktiivsus, AE allikate kontsentratsioon. Klassifitseerimissüsteem sisaldab ka kontrollitava objekti ja aja laadimisparameetreid.
Identifitseeritud ja tuvastatud AE allikad on soovitatav jagada nelja klassi - I, II, III ja IV:
klass 1 allikas – passiivne allikas;
II klassi allikas – aktiivne allikas;
III klassi allikas – kriitiliselt aktiivne allikas;
IV klassi allikas on katastroofiliselt aktiivne allikas.
Soovitatav on valida konkreetse objekti akustilise emissiooni seire käigus iga kord AE allikate klassifikatsioonisüsteem ja allikate lubatud tase (klass), kasutades punktis toodud andmeid. Mõned välismaised regulatiivsed ja tehnilised dokumendid on võtnud kasutusele muud klassifikatsioonisüsteemid ().
|
Allika 1 klass – (passiivne) |
salvestatud, et analüüsida selle edasise arengu dünaamikat. |
|
II klassi allikas – (aktiivne) |
|
|
III klassi allikas – (kriitiliselt aktiivne) |
1) fikseerib ja jälgib selle kontrolli teostamise käigus olukorra arengut; |
|
2) rakendama meetmeid, et valmistuda võimalikuks koormuse langemiseks. |
|
|
IV klassi allikas – (katastroofiliselt aktiivne) |
1) viivitamatult vähendada koormust 0-ni või väärtuseni, mille juures AE allika klass langeb II ja I klassi tasemele; |
|
2) pärast koormuse vabastamist kontrollitakse objekti ja vajadusel kontrollitakse seda muude meetoditega. |
Iga kõrgem AE allika klass hõlmab kõigi madalamate klasside allikate jaoks määratletud toimingute sooritamist.
Kui objekti tehniline seisukord on akustilise emissiooni testimise tulemuste põhjal hinnatud positiivselt või puuduvad registreeritud AE allikad, ei ole täiendavate mittepurustavate katsete liikide kasutamine vajalik. Kui akustilise emissiooni testimise tulemuste tõlgendamine on ebakindel, on soovitatav kasutada täiendavaid mittepurustavate katsete liike.
Lõplik hinnang tuvastatud AE allikate ja näidustuste vastuvõetavuse kohta täiendavat tüüpi mittepurustavate katsete kasutamisel viiakse läbi mõõdetud defektiparameetrite abil, mis põhinevad murdumismehaanika standardmeetoditel, konstruktsioonide tugevuse arvutamise meetoditel ja muudel kehtivatel regulatiivdokumentidel.
7. Dokumentatsioon
kontrolli tulemused
Akustilise emissiooni kontrolli tulemused peavad sisalduma aruandlusdokumentides - aruanne, protokoll ja järeldus, mille koostab teostaja - akustilise emissiooni kontrolli teostanud organisatsioon. Protokoll ja järeldus on aruande osa, neid saab kasutada ka iseseisvate dokumentidena. Sarnaste objektide testitulemuste põhjal saab kliendile esitada ühtse aruande, kus on märgitud kontrollobjektide registreerimisnumbrid.
Aruanne koostatakse kliendi soovil. Venemaa Gosgortekhnadzori territoriaalorgani esindaja nõudmisel tuleb aruandedokumendid esitada Venemaa Gosgortekhnadzori organile. Teostatud akustilise emissiooni testimise tulemustega seotud aruande või muude materjalide üleandmine kolmandale isikule (juriidiline isik või füüsiline isik) võib olla lubatud ainult kliendi loal.
Akustiliste emissioonide kontrolli tulemuste aruanne peab sisaldama põhjalikke andmeid akustiliste emissioonide kontrolli ettevalmistamise ja läbiviimise kohta, samuti teavet, mis võimaldab hinnata objekti seisukorda ning kinnitada teostaja ja spetsialistide klassifikatsiooni taset. viis läbi kontrolli, mille põhjal saad hinnata tulemuste usaldusväärsust.
Akustilise emissiooni kontrolli tulemuste aruande sisule esitatavad nõuded on toodud viites. Protokolli ja järelduse vormid on toodud nõutavates lisades ja (vastavalt).
Kõik objekti akustilise emissiooni kontrolliga seotud materjalid (töö, süvis jne), samuti aruandedokumente tuleb töövõtja poolt säilitada vähemalt 10 aastat või kuni objekti korduva akustilise emissiooni kontrollimiseni. Selle objekti korduva akustilise emissiooni testimise teostamisel teise töövõtja poolt tuleb tellija nõudmisel algmaterjalid ja aruandedokumendid täies mahus üle anda talle.
8. Ohutusnõuded
kontrolli teostamine
Akustilise emissiooni kontrolli teostamisel tuleb tagada tööde teostamise tehnilised ohutusnõuded vastavalt kehtivatele regulatiivsetele dokumentidele, sealhulgas GOST 12.1.019-79. "SSBT. "Elektriohutus. Üldnõuded", Tarbija elektripaigaldiste tööeeskirjad ja punkt 4.6. "Surveanumate projekteerimise ja ohutu käitamise eeskiri."
9. Vastutus nõuete rikkumise eest
Akustiliste emissioonide kontrolli eeskirjad
9. jagu.
(Välitatud,Muuda nr 1 )
Lisa 1
(Informatiivne)
Akustilise emissiooni seire tulemused esitatakse registreeritud akustilise emissiooni allikate (AE) loeteluna, mis on määratud konkreetsesse klassi sõltuvalt AE parameetrite väärtusest. See hinnang tehakse iga AE signaaliallika kohta. Kontrollitava objekti seisukorda hinnatakse ühe või teise klassi AE allikate olemasolu alusel kontrollitavas objektis.
Spetsiifiliste AE allikate klassifitseerimissüsteemide kasutamine ja objektide seisukorra hindamise kriteeriumid sõltuvad kontrollitavate objektide materjalide mehaanilistest ja akustilis-emissiooni omadustest. Klassifitseerimissüsteemi ja objekti seisundi hindamise kriteeriumide valik toimub allpool loetletud liigitussüsteemide ja kontrollitava objekti seisundi hindamise kriteeriumide abil. Teiste klassifitseerimissüsteemide ja hindamiskriteeriumide (ning AE signaali parameetrite vastavate väärtuste, mis määravad allikaklassid ja hindamiskriteeriumid) kasutamine on lubatud, kui nende kasutamine on põhjendatud.
Valik tehakse enne akustiliste emissioonide testimist ja fikseeritakse selle dokumendi alusel välja töötatud või sellega vastavusse viidud Juhtimistehnoloogias. Pärast seda teostab töövõtja vastava seadmete seadistamise ja vajaliku tarkvaratoote väljatöötamise (vajadusel).
P 1.1. Amplituudi kriteerium [MR 204-86]
Arvutage keskmine amplituud A cf vähemalt kolm impulssi individuaalse amplituudiga A c iga AE allika jaoks valitud vaatlusintervalli jaoks. Amplituudi reguleerimisel võetakse arvesse AE signaalide nõrgenemist, kui need levivad läbi materjali.
Eelkatsetes määratakse lubatud amplituudi piirväärtus A t:
Kus U sellest ajast - amplituudi eristamise läviväärtus, A c on AE signaali poolt ületatud läviväärtus, mis vastab materjali prao kasvule, IN 1 ja IN 2 - katse põhjal määratud koefitsiendid. Nende koefitsientide väärtused on vahemikus 0–1.
Allikad liigitatakse järgmiselt.
I klassi allikas - allikas, mille keskmist impulsi amplituudi ei arvutatud (vaatlusintervalli jooksul saadi alla kolme impulsi);
II klassi allikas – allikas, mille puhul kehtib ebavõrdsus: A kolmap< A t;
III klassi allikas – allikas, mille puhul kehtib ebavõrdsus: A kolmapäev > A t;
IV klassi allikas on allikas, mis sisaldab vähemalt kolme registreeritud impulssi, mille puhul kehtib järgmine ebavõrdsus: A kolmapäev > A t.
Konkreetsed väärtused A t, IN 1 ja IN 2 sõltuvad kontrollitava objekti materjalist ja määratakse eelkatsetega.
P 1.2. Integraalkriteerium [MR 204-86]
Iga tsooni jaoks arvutatakse AE signaaliallikate aktiivsus avaldise abil:
![]()
 k
= 1, 2 +, TO
k
= 1, 2 +, TO
Sündmuste arv k-parameetrite hindamise intervall;
sündmuste arv k+1. parameetri hindamise intervall;
k- parameetrite hindamise intervalli number.
Vaatlusintervall on jagatud k parameetrite hindamise intervallid.
Tehke hinnang:
F<<1,
F= 1,
F>1.
Arvutage suhteline tugevus J k AE allikas igal salvestusintervallil
![]()
Kus A k- keskmine allika amplituud intervalli jooksul k;
AK- kõigi AE allikate keskmine amplituud kogu objekti ulatuses, välja arvatud intervalli analüüsitud allikas k;
W- eelkatsetes määratud koefitsient.
|
Jk<1 |
J k >1 |
J k ³ 1 |
|
|
F£ 1 |
|||
|
F=1 |
|||
|
F>1 |
P 1.3. Kohalik dünaamiline kriteerium [MR 204-86]
Hindamine viiakse läbi reaalajas, kasutades järgmisi AE parameetreid:
Väljaannete arv järgneval sündmusel;
Eelmise sündmuse heitkoguste arv või;
Järgneva sündmuse energia;
Eelmise sündmuse energia.
Energia asemel võib kasutada parameetrit – amplituudi ruutu.
Iga sündmuse jaoks arvutatakse väärtused:
Või

Kus - välise parameetri väärtus järgneva sündmuse salvestamise hetkel (kui parameetrina kasutatakse aega, siis on see ajavahemik vaatlusintervalli algusest);
Välise parameetri väärtus eelmise sündmuse salvestamise hetkel (kui parameetrina kasutatakse aega, siis on see ajavahemik vaatlusintervalli algusest).
I klass -
II klass -
III klass -
IV klass -
P 1.4. Integraalne dünaamiline kriteerium [NDIS 2412-80 standard, Jaapan]
P 1.4.1. Iga allika jaoks määratakse kontsentratsiooni koefitsient KOOS:
kus R on AE allika keskmine raadius.
P 1.4.2. Iga allika jaoks määratakse koguenergia:
![]()
P 1.4.3. Vastavalt lõigetele. P 1.4.1. ja P 1.4.2. hinnata punkti asukohta tasapinnal IgC - lgE koordinaatides (tabel P 1.4.1.). Määratakse allika auaste. Eraldusjoonte asukoht määratakse eelkatsetega.
Tabel P 1.4.1.

P.1.4.4. Moodustage väärtus R, mis iseloomustab allika energia vabanemise dünaamikat vaatlusintervalli jooksul:
 k = 1, 2 +, K.
k = 1, 2 +, K.
P . 1.4.5. Allika tüüp määratakse vastavalt tabelile. Punkt 1.4.2.
Tabel P 1.4.2.
|
R |
Tüüp |
|
R£ 1 |
|
|
P<1 |
|
|
P=1 |
|
|
P>1 |
P. 1.4.6. Allikas liigitatakse tabeli järgi. P 1.4.3.
Tabel P 1.4.3.
|
Tüüp |
Koht |
|||
P 1.5. ASME koodi kriteeriumid.
Kontrolli tulemuste hindamine toimub vastavalt tabelile P 1.5. Parameetrite konkreetsed väärtused sõltuvad katsetingimustest, kontrollitava objekti materjalist ja selle seisukorrast.
P 1.6 AE allikate klassifitseerimise süsteem tehnoloogiasMONPAC
AE allikad on jagatud klassidesse vastavalt parameetrite "jõuindeksi" ja "ajaloolise indeksi" väärtustele. "võimsuse indeks" S av on defineeritud väljendiga:
![]()
Kus S oi on i-nda sündmuse signaali tugevus, mis on kaks korda suurem kui AE impulsi mähisjoone alune ala.
![]() .
.
Ajaloolise indeksi määrab avaldis:

Pärast iga registreeritud AE impulsi indeksi väärtuste arvutamist klassifitseeritakse allikad vastavalt tabelile P 1.6, kus võetakse vastu järgmine klassifikatsioon.
|
AE allikaklass |
AE allika kirjeldus |
|
Minor allikas – salvestatud edaspidiseks testimiseks. |
|
|
Allikas registreeritakse arvestuseks tulevastes katsetes, objekti pinda kontrollitakse, et tuvastada pinnadefekte nagu korrosioon, lohk, praod jms. |
|
|
Allikas viitab defekti olemasolule, mis nõuab akustiliste emissioonide katseandmete hilisemat analüüsi, korduvat akustilise emissiooni testimist või katsetamist muude meetoditega. |
|
|
Allikas viitab olulise defekti olemasolule, mis nõuab hilisemat kontrolli, kasutades muid meetodeid. |
|
|
Allikas viitab suure defekti olemasolule, mis nõuab laadimise viivitamatut lõpetamist ja kontrolli muude meetoditega. |
Tabel P 1.5
TSOONI ASUKOHA HINDAMISE KRITEERIUMID*
|
Heitkogused kandevõime ajal |
Loendamise kiirus |
Impulsside arv |
Suure amplituudiga impulsside arv |
MARSE ehk amplituud |
Tegevus |
Lävi, dB |
|
|
Esmalaadimine Surveanumad, mis ei ole pärast keevitamist kuumtöödeldud |
Mitte rohkem kui impulsse korraga |
Pole kasutatud |
Pole kasutatud |
MARSE ehk impulsi amplituud koormusega ei suurene |
Aktiivsus ei suurene koormuse suurenedes |
||
|
Muud surveanumad |
Mitte rohkem kui impulsse korraga |
Vähem kui heitkogused PAE kohta antud koormuse suurenemise korral |
Määratud amplituudist kõrgemaid impulsse enam pole |
Määratud amplituudist kõrgemaid impulsse enam pole |
MARSE ehk impulsi amplituud koormusega ei suurene |
Aktiivsus ei suurene koormuse suurenedes |
Märge:
A. E N, N T, E T ja E A on AE parameetrite lubatud väärtused.
B. V TH on etteantud lävi.
B.T N on määratud ooteaeg.
*Vastavalt ASME koodile
P 1.7. Pidev AE kriteerium.
Pideva AE registreerimine, mille tase ületab seiresüsteemi lävitaseme, näitab lekke olemasolu kontrollitava objekti seinas. Pideva AE kriteeriumi järgi liigitatakse olukord järgmiselt:
I - pideva AE puudumine;
IV – pideva AE registreerimine.
AE allikate klassifitseerimise skeem tehnikas MONPAC

H – ajalooline indeks
2. lisa
(Informatiivne)
1. GOST 27655-88. Akustilised emissioonid. Mõisted, määratlused ja tähistused.
13. Protsessitorustike projekteerimise ja ohutu käitamise eeskirjad. PB 03-94. Kinnitatud Venemaa Gosgortekhnadzori 2. märtsi 1995. aasta resolutsiooniga nr 11.
14. Külmutussüsteemide projekteerimise ja ohutu kasutamise eeskirjad. M.: 1991.
15. Tarbija elektripaigaldiste tehnilise käitamise eeskiri ja Tarbija elektripaigaldise käitamise ohutuseeskiri." M.: 1986.
16. ASTM E 569-91 "Standard tava konstruktsioonide akustilise emissiooni seireks kontrollitud stimulatsiooni ajal".
17. ASTM E 1316-94 "Akustilise emissiooniga seotud terminite standardmääratlused".
18. ASTM E 650-92 "Piesoelektriliste akustiliste emissiooniandurite paigaldamise standardjuhend".
19. ASTM E 750-93 "Emissiooni mõõteriistade iseloomustamise standardpraktika".
20. ASTM E 1106-92 "Akustiliste emissiooniandurite esmase kalibreerimise standardmeetod".
21. ASTM E 1139-92 "Metalli rõhupiiridelt lähtuva heitkoguse pideva monitooringu standardne praktika".
22. ASME 1419-91. "Akustilist emissiooni kasutavate õmblusteta gaasiga täidetud surveanumate uurimise katsemeetod".
23. ASME. "Kavandatav standard akustilise emissiooni kontrollimiseks rõhu rakendamisel" E 00096 (1975).
24. ASME. "Akustilise emissiooni uuringu kasutamine radiograafia asemel", koodjuhtumi nr 1968, VIII jaotis, 1. jagu (1982).
25. ASME. "Metallmahutite akustilise emissiooni uurimine rõhukatsetuse ajal" artikli 12 alajao A, V jaotise katelde ja surveanumate koodeks (1988. aasta detsembri lisa ja hilisemad väljaanded).
26. ASME. "Akustiline emissioon edukate kontrollide jaoks. XI jaotis, 1. osa", juhtum N-471, lisa nr. 5, Code Cases 1989 Edition, Nuclear Components, Boiler and Pressuressel Code. Kinnitamise kuupäev: 30. aprill 1990.
27. ASME. "Akustiline emissioon surveanuma pidevaks seireks", artikkel 13, V jaotis, Katla ja surveanuma kood.
28. NDIS 2412-1980. "Kõrge tõmbetugevusega terasest valmistatud sfääriliste surveanumate akustilise emissiooni testimine ja katsetulemuste klassifitseerimine."
29. Fowler T.J., Blessing J.A., Conlisk P.J., Swanson T.L. MONPAC süsteem. Journal of Acoustic Emission, 1989, 8. köide, number 3, 1-8.
3. lisa
(Informatiivne)
SISUNÕUDED
KONTROLLI ARUANNE
Kõik aruande jaotised on loetletud.
2. Sissejuhatus.
Esitatakse teave, mis eelneb kokkuleppele akustilise emissiooni testimise läbiviimiseks ja põhjendab konkreetse objekti akustilise emissiooni testimise teostamise vajadust.
3. Kontrolli objekt.
Esitatakse kõik andmed, mis võivad mõjutada akustiliste emissioonide testimise tulemusi. Kirjeldab kontrollitavat objekti, sealhulgas materjali, tootmismeetodit, tootja nime, Novell töö, sealhulgas töö- ja avariirežiimid, samuti andmed koormuse vähendamise operatsioonide kohta enne jälgimist lõõgastumiseks.
Kaasas on anuma eskiis või tootja joonis, mis näitab PAE mõõtmeid ja asukohta.
4. Kontrollitingimused.
Kirjeldatakse tingimusi, mille korral akustilise emissiooni testimist tehakse, sealhulgas keskkonnatingimusi, akustilise müra taset, vibratsiooni ja elektromagnetilisi häireid. Antakse kasutatav töövedelik (katsevedelik või gaas), töövedeliku temperatuur, keskkond ja objekti materjal. Meetmed häirete taseme vähendamiseks. Märgitakse ebatavalisi nähtusi ja kõike, mis võib mõjutada akustiliste emissioonide testimise tulemusi.
5. Ettevalmistus akustiliste emissioonide testimiseks.
Kirjeldatud on kõik tegevused, mis on seotud akustiliste emissioonide testimiseks valmistumisega. Antakse kõik toimingud juhtimiseks ettevalmistamiseks, sh objekti ettevalmistamine, AE muundurite arvu ja AE muundurite paigutuse valiku põhjendus, samuti muundurite paigutuse tehnoloogilised toimingud, andmed lainesummutuse kohta.
6. AE allikate klassifitseerimise süsteem ja tagasilükkamise kriteeriumid.
Kirjeldatakse selle objekti akustiliste emissioonide testimiseks valitud kriteeriume. Esitatakse konkreetset tüüpi kriteeriumide ja nende väärtuste valimise põhjendus. Antakse AE allikate klassifikatsioon ja operaatorite tegevused ühe või teise klassi AE allika registreerimisel.
7. AE seadmed.
Seadmete valik on põhjendatud ning kõik valitud AE seadmete olulised parameetrid on ära toodud. Esitatakse akustiliste emissioonide seire tehniliste vahendite täielik kirjeldus, sealhulgas tootja nimi, mudelinumbrid, kasutatud andurite tüüp ja arv, süsteemi võimendus, seadme enda elektroonilise müra tase, seadmete kalibreerimistehnika ja viimase kalibreerimise kuupäev. Kirjeldatud on AE-muundurid, sealhulgas AE-muunduri tootja, tüüp ja parameetrid, tootmisaasta ja seerianumbrid ning AE-muunduri kalibreerimismeetod.
Võimendustegurite väärtused ja seadmete parameetrite muutused testimise ajal on paigutatud tabelisse.
Tabel
8. AE seadmete seadistamine.
Põhjendatud on juhtimisparameetrite valik ning kanalite ja kõigi seadmete seadistamise operatsioonid.
9. Juhtimistehnoloogia.
Antud on konkreetsed tehnikad, mida kasutatakse otseselt selle objekti juhtimiseks. Märgitakse üles kõik kõrvalekalded juhtimistehnoloogiast, mis on koostatud enne akustiliste emissioonide testimist, ja põhjused, mis neid kõrvalekaldeid põhjustasid. Soovitatav on lisada juhttehnoloogiasse üksuste andmed. Selle taotluse 4–10.
10. Akustilise emissiooni testimise läbiviimine.
Kirjeldatakse akustiliste emissioonide kontrolli protsessi ja operaatorite tegevust. Antakse analüüs olukordadest, mis tekivad vahetult akustilise emissiooni testimisel.
Arvestades:
laadimisgraafik, mis oli eelnevalt koostatud, ja tegelikult rakendatud ajakava (laadimiskiirus, pidamisajad ja koormuse väärtused). Märgitakse kõrvalekallete põhjused, kui neid on;
testimise käigus saadud andmete korrelatsioon aktsepteerimiskriteeriumitega;
objekti eskiis või joonis, mis näitab tagasilükkamiskriteeriumile mittevastavate tsoonide asukohta;
mis tahes ebatavalised nähtused või tähelepanekud katsetamise ajal.
11. Akustiliste emissioonide testimise tulemuste töötlemine ja esitamine.
Aruanne sisaldab:
lõpetamise kaart;
akustilise emissiooni kontrolli kaart;
AE allikaid kirjeldav tabel;
graafiline materjal, mis kajastab AE allikate käitumist laadimise ajal.
Kalibreerimiskaart kujutab objekti skemaatilist diagrammi, mis näitab AE-signaalide andurite ja simulaatorite asukohta ning kalibreerimistulemusi. See on toodud akustilise emissiooni kontrollimise protokollis.
Akustilise emissiooni kontrolli kaart kujutab objekti paigutusskeemi, mis näitab:
AE-muundurite asukoht vastava numeratsiooniga (rühma number/muunduri number);
peamiste konstruktsioonielementide (jäikused, torud, keevisõmblused jne) asukoht;
muude meetoditega tuvastatud defektide asukoht.
AE protsessi dünaamikat kajastav graafiline materjal tuleks esitada sõltuvusgraafikute kujul.
Kirjeldage kõiki seireprotsessi käigus tuvastatud AE allikaid. AE tuvastatud allikate hindamiseks tuleks kasutada üht kriteeriumi. Nende ohtlikkuse astet hinnatakse vastavalt valitud klassifikatsioonisüsteemile.
Eraldi on esile tõstetud kõik need allikad, mis ei vasta kontrollitava objekti edasise toimimise nõuetele (vastavalt valitud omadustele ja tagasilükkamiskriteeriumitele).
12. Personal, kes tegi akustilise emissiooni katseid.
Loetlege spetsialistid, kes tegid akustilise emissiooni testimist. Esitatakse nende klassifikatsiooni tase, kus ja millal litsents on saadud ning kes väljastas kvalifikatsioonitunnistuse. Nad annavad ülevaate erialainspektorite kogemustest ja kontrollitud objektide arvust.
13. Järeldus akustilise emissiooni kontrolli tulemuste põhjal.
Akustilise emissiooni testimise tulemuste põhjal tehtud järeldus tehakse punktis toodud kujul. Akustiliste emissioonide seireandmed tuleks salvestada koos rajatise dokumentidega.
14. Kontrolli teostamisel ja aruande koostamisel kasutatavad mõisted.
16. Taotlused. Lisad peavad sisaldama protokolli ja järeldust, mis põhinevad akustilise emissiooni kontrolli tulemustel (protokolli ja järelduse vormid on toodud lisades 4 ja käesolevas dokumendis).
Läbiviidud akustilise emissiooni kontrolli kohta tehtud järelduse alusel teeb objekti eest vastutav isik kontrollitava objekti passi kirje objekti tehnilise seisukorra ja järgmise kontrolli aja kohta.
2. Kontrolli teostav organisatsioon: ______________________________________________________________
3. Objekti andmed:
tootja _________________________________________________________________________;
isikut tõendav dokument ___________;
kasutuselevõtu kuupäev ______________________________;
materjali hinne ______________________________________;
GOST (TU) _______________________________;
valmistamisviis ____________________________________________________________________;
seina paksus ______________________________________ mm;
siseläbimõõt ________________________________________ mm;
kontrollitava ala mõõtmed___________________________________________________ m;
töörõhk _________________________ MPa (______________________________kgf/cm);
töökeskkond _________________________________________________________________________;
töötemperatuur ____________________________________°C;
pinna seisukord _______________________________________________________________;
magnetilised omadused _______________________________;
laine sumbumise karakteristikud _____________________________________________________;
anuma eskiis, kus on märgitud AE andurite mõõtmed ja paigutus (lisas).
4. Lisainfo objekti kohta __________________________________________________
_____________________________________________________________________________
5. Tüüp ja katsetingimused ____________,
töövedelik _______________________ (hüdrauliline või pneumaatiline)
objekti _______________ ja ümbruse temperatuur
keskkond _______________,
Laadimisseadmete mark: _____________________________________________________________,
katserõhk ____________________________ MPa (_______________ kgf/cm 2),
6. Laadige graafiku parameetrid:
(laadimiskiirus ____________________, hoidmisaeg _________________________,
koormuse väärtused hoidmise ajal __________________________________________________)
_____________________________________________________________________________
7. AE-seadmete tüüp ja omadused, sealhulgas tootja nimi;
mudel ja seadme number ______________________________________________________________________
_____________________________________________________________________________
_____________________________________________________________________________
_____________________________________________________________________________
8. Konverterite arv ja tüüp: ________________________________________________________
_____________________________________________________________________________
_____________________________________________________________________________
9. Kontaktandmed: ______________________________________________________________________
10. AE-seadmete töörežiim ja nende jõudluse kontrollimine enne testimist
ja pärast testimist):
eelvõimendus __________________ dB
(_________ dB);
peamine võimendus kanalites _______________ dB
(____________);
kanali diskrimineerimise tase _______________ dB
(___________ µV);
enesemüra tase (viide sisendile
eelvõimendi): _____________ dB (_____________________ µV);
töösagedusriba: __________-____________ kHz.
11. Seadme parameetrite muutused katsetamise ajal:_______________________________
12. Taotluste loend:
juhtobjekti eskiis ja paigutusskeem
AE muundurid;
laadimisgraafik;
AE registreerimise tulemused (joonis ________________________________________________________)
Põhiteave kontrolli tulemuste kohta:
(sealhulgas allikate kirjeldus ja nende jaotus klasside kaupa - “passiivne”,
"aktiivne", "kriitiliselt aktiivne", "katastroofiliselt aktiivne" - ja kriteeriumid).
______________________________________________________________________________
______________________________________________________________________________
Eksami viisid läbi:
akustilised operaatorid
heitgaaside kontroll
allkiri perekonnanimi
I taseme kvalifikatsioon __________________ (_____________________)
allkiri perekonnanimi
I taseme kvalifikatsioon __________________ (_____________________)
allkiri perekonnanimi
Kontrolliobjekt:______________________________________________________________________
Kes kontrollis: _____________________________________________________________
Üksikasjalik teave teostatud akustilise emissiooni kohta
kontroll sisaldub aruandes.
Hüdro- (pneumaatilise) akustilise emissiooni kontrolli tulemusena
objekti testimine näitas järgmist ("passiivne", "aktiivne",
"kriitiliselt aktiivsed", "katastroofiliselt aktiivsed") akustikaallikad
heitkogused, mille põhjal tehti järgmine järeldus: ____________________________
_____________________________________________________________________________
_____________________________________________________________________________
_____________________________________________________________________________
_____________________________________________________________________________
_____________________________________________________________________________
Uuring hõlmab viiteandmete hankimist tehnilisest dokumentatsioonist, teatmeteostest ja muust tehnilisest kirjandusest, samuti spetsiaalsete laboratoorsete või tööstuslike katsete läbiviimist
Kontrolli täitja
Akustiliste emissioonide kontrolli teostav organisatsioon. Vastab ISO 9004-2 standardi terminile "tarnija" (teenindusorganisatsioon)
Kliendi kontroll
Akustiliste emissioonide testimist telliv organisatsioon. Vastab ISO 9004-2 standardi terminile "tarbija".
Juhtimisobjekti omanik
Organisatsioon, mis omab kontrolliobjekti
Akustilise emissiooni testimise tehnika
Tehnoloogilised toimingud, mis näitavad nende parameetreid konkreetse objekti akustilise emissiooni testimise läbiviimiseks
AE-muunduri andurelement
Anduri osa, kus toimub akustilise signaali otsene muundamine elektriliseks signaaliks
Tsooni juhtimine
Objekti konkreetse ala jälgimine ilma AE allika koordinaate määramata
Müratase
RMS mürasignaal
Akustilise emissiooni kontrolli vahendid
Tehnilised vahendid, sealhulgas AE muundurid, ühenduskaablid, lainejuhid, kontaktkandjad, seadmed
Mittepurustav katse (NDT)- objekti või selle elementide parameetrite usaldusväärsuse tehnoloogiline kontroll. Selle teostamisel ei võeta uuritavat objekti kasutusest välja ega lammutata.
Mittepurustavat testimist kasutatakse hoonete ja rajatiste diagnostikaks, samuti keerukate tehnoloogiliste seadmete puhul. Mittepurustav testimistehnoloogia on ohutu ja on tööstusohutuse ekspertiisi oluline element. Tänu mittepurustavale testimisele on tehniline ohutus tagatud igas rajatises.
Akustilise emissiooni kontrolli meetod
Akustilise emissiooni meetod (AE)- põhineb nähtusel, mida nimetatakse akustiliseks emissiooniks. Akustiliste lainete tekkimisel ja levimisel pingestatud materjali deformeerumisel või gaaside väljavoolul ja muudel protsessidel tekivad akustiliste lainete elastsed vibratsioonid, mille andmete põhjal määratakse defektide teke konstruktsiooni hävimise algstaadiumis. Tänu kandja liikumisele on AE-d võimalik kasutada protsesside ja materjalide diagnostikaks, näiteks materjali terviklikkuse kriteeriumiks.
Akustilise emissiooni mittepurustav katsemeetod— see on mõõdistusobjektide tehnilise seisukorra jälgimine. See põhineb kiirguse ja pingelainete salvestamise põhimõtetel materjalis, mis on allutatud koormusele jõu, rõhu, temperatuuri jne toimel. Koormuse tüübi valiku määravad uuritava objekti töötingimused, selle konstruktsioon ja katsete laad.
Rakendus
Seda meetodit saab kasutada nii juhtimisobjektide valmistamisel, nende tootmiskatsete ajal, tehnilise kontrolli ajal kui ka vahetult töötamise ajal.
Miks on AE kontrolli meetodit vaja?
Akustilise emissiooni NDT eesmärk on tuvastada, määrata koordinaadid ja jälgida akustilise emissiooni allikaid, mis on seotud katkestustega anuma seina pinnal või mahus, keevisliitmikus ning valmistatud osades ja komponentides.
Tehniliste võimaluste olemasolul on vaja AE allikaid hinnata muude NDT meetodite abil.
Defektide tekkimise kiiruse hindamiseks saab kasutada akustilise emissiooni NDT meetodit. Sel juhul on võimalik katsetamine eelnevalt katkestada ja vältida objekti (toote) hävimist. See meetod võimaldab teil määrata tihendite, pistikute ja liitmike erinevate pragude, lekete ja muude vigade tekkimist.
Kes on veadetektor?
Vigade detektor on mittepurustavate katsete spetsialist. Veadetektori tööülesannete hulka kuulub objektide, aga ka nende osade (koostude) diagnoosimine erinevate defektide tuvastamiseks. Juba ainuüksi eriala nimetus viitab sellele, et veaotsija elukutse on väga vastutusrikas, multidistsiplinaarne ja raske. Mittepurustava testimise spetsialist peab enesekindlalt töötama kallite ja keerukate seadmetega, omama laialdasi tehnilisi teadmisi, tundma standardeid, veadetektorite norme, eeskirju ja erinevat tüüpi dokumentatsiooni.
Veadetektori sertifikaat
Personali sertifitseerimine (sertifitseerimine). mittepurustavad katsemeetodid I, II ja III kvalifikatsioonitasemel läbib vastavalt nõuetele.
Sertifitseerimiskulude täpseks arvutamiseks peate valima meetodid ja objektid, mille jaoks peate olema koolitatud.
Mittepurustavate katsete (NDT) põhimeetodid ja objektid
Vigade tuvastamise meetodid:
- - põhineb nähtusel, mida nimetatakse akustiliseks emissiooniks. Akustiliste lainete tekkimisel ja levimisel pingestatud materjali deformeerumisel või gaaside väljavoolul ja muudel protsessidel tekivad akustiliste lainete elastsed vibratsioonid, mille andmete põhjal määratakse defektide teke konstruktsiooni hävimise algstaadiumis. Tänu kandja liikumisele on AE-d võimalik kasutada protsesside ja materjalide diagnostikaks, näiteks materjali terviklikkuse kriteeriumiks;
- - põhineb sagedusega 0,5–25 MHz ultrahelivibratsioonide leviku uurimisel kontrollitavates toodetes, kasutades spetsiaalset varustust - ultraheli veadetektor;
- Magnetiline (MK)- põhineb interaktsioonianalüüsil magnetväli kontrollitava objektiga;
- Elektriline (EC)- põhineb parameetrite registreerimisel elektriväli, suhtlemine kontrollitava objektiga või tekkimine kontrollitavas objektis välismõju tulemusena;
- Pöörisvool (VC)- põhineb pöörisvoolumuunduri välise elektromagnetvälja interaktsiooni analüüsil juhitavas objektis indutseeritud pöörisvoolude elektromagnetväljaga;
- Raadiolaine (RVK)- põhineb kontrollitava objektiga interakteeruvate raadiosagedusala elektromagnetlainete parameetrite muutuste registreerimisel;
- Termiline (TC)- põhineb defektidest põhjustatud kontrollitavate objektide soojus- või temperatuuriväljade muutuste registreerimisel;
- Optiline (OK)- juhitava objektiga interakteeruva optilise kiirguse parameetrite registreerimisel;
- — põhineb läbitungiva ioniseeriva kiirguse registreerimisel ja analüüsil pärast interaktsiooni kontrollitava objektiga. Sõna "kiirgus" võib asendada sõnaga, mis tähistab teatud tüüpi ioniseerivat kiirgust, näiteks röntgen, neutron jne;
- Läbistavad ained- põhineb ainete tungimisel kontrollitava objekti defektiõõnsustesse. Neid on mitut tüüpi seda meetodit nt "kapillaar (PVK)" või "lekke tuvastamine (PVT)", mida kasutatakse defektide tuvastamiseks;
- - põhineb keevitusõmbluste visuaalsel kontrollil ja kvaliteedikontrollil, töödeldavate detailide keevitamiseks ettevalmistamisel ja kokkupanekul. Selle kontrolli eesmärk on tuvastada mõlgid, täkked, rooste, põletused, longus ja muud nähtavad defektid. See meetod eelneb teistele vigade tuvastamise meetoditele ja on põhiline;
- Vibordiagnostiline (VD) – juhitava objekti töötamise ajal tekkivate vibratsiooniparameetrite analüüsi põhjal. Vibratsioonidiagnostika on suunatud vibratsioonidiagnostika kontrolli all oleva objekti rikete otsimisele ja tehnilise seisukorra hindamisele.
Vigade tuvastamise objektid:
1. Katla kontrollimise vahendid
- 1.1. Auru- ja soojaveeboilerid
- 1.2. Elektriboilerid
- 1.3. Anumad, mis töötavad rõhu all üle 0,07 MPa
- 1.4. Auru- ja kuumaveetorustikud tööauru rõhuga üle 0,07 MPa ja veetemperatuuriga üle 115°C
- 1.5. Survekambrid
2. Gaasivarustussüsteemid (gaasijaotus)
- 2.1. Välised gaasitorud
- 2.1.1. Välised terasest gaasitorud
- 2.1.2. Välised gaasitorud polüetüleenist
- 2.2. Terasest sisemised gaasitorud
- 2.3. Osad ja komponendid, gaasiseadmed
3. Tõstekonstruktsioonid
- 3.1. Tõstekraanad
- 3.2. Liftid (tornid)
- 3.3. Köisraudteed
- 3.4. Funikulöörid
- 3.5. Eskalaatorid
- 3.6. Liftid
- 3.7. Torupaigalduskraanad
- 3.8. Laadurkraanad
- 3.9. Tõsteplatvormid puuetega inimestele
- 3.10. Kraana jäljed
4. Kaevandusrajatised
- 4.1. Kaevanduste, töötlemisettevõtete, pelletitehaste ja paagutustehaste pinnakomplekside hooned ja rajatised
- 4.2. Miinitõstemasinad
- 4.3. Kaevandamine, transport ja kaevandusseadmed
5. Söetööstuse rajatised
- 5.1. Miinitõstemasinad
- 5.2. Peamised ventilatsiooniventilaatorid
- 5.3. Kaevandus-, transpordi- ja söetöötlemisseadmed
6. Nafta- ja gaasitööstuse seadmed
- 6.1. Kaevude puurimisseadmed
- 6.2. Kaevude käitamise seadmed
- 6.3. Seadmed puurkaevude arendamiseks ja remondiks
- 6.4. Gaasi- ja naftapumplate seadmed
- 6.5. Gaasi- ja naftatoodete torustikud
- 6.6. Nafta ja naftatoodete mahutid
7. Metallurgiatööstuse seadmed
- 7.1. Tehniliste seadmete, hoonete ja rajatiste metallkonstruktsioonid
- 7.2. Protsessi gaasijuhtmed
- 7.3. Raudkandjate, teraskulpide, metallivalamise koppide tang
8. Plahvatus-, tule- ja keemiaohtlike tööstuste seadmed
- 8.1. Seadmed keemia-, naftakeemia- ja naftatöötlemistehastele, mis töötavad rõhu all kuni 16 MPa
- 8.2. Seadmed keemia-, naftakeemia- ja naftatöötlemistehastele, mis töötavad rõhu all üle 16 MPa
- 8.3. Vaakumis töötavate keemia-, naftakeemia- ja naftarafineerimistehaste seadmed
- 8.4. Mahutid plahvatus- ja tuleohtlike ning mürgiste ainete hoidmiseks
- 8.5. Isotermilised hoidlad
- 8.6. Krüogeensed seadmed
- 8.7. Ammoniaagi jahutusseadmete seadmed
- 8.8. Ahjud
- 8.9. Kompressor ja pumpamisseadmed
- 8.10. Tsentrifuugid, separaatorid
- 8.11. Mahutid, mahutid (tünnid), balloonid plahvatusohtlike ja tulemürgiste ainete jaoks
- 8.12. Protsessi torustikud, auru- ja kuumaveetorustikud
9. Raudteetranspordi rajatised:
- 9.1. Ohtlike ainete veoks ette nähtud veerem ja konteinerid
ained. - 9.2. Raudtee harutee.
10. Teravilja ladustamis- ja töötlemisrajatised:
- 10.1. Puhurimasinad (õhuturbokompressorid, turbopuhurid).
- 10.2. Ventilaatorid (tsentrifugaal-, radiaal-, VVD).
- 10.3. Haamerpurustid, rullmasinad, entolaatorid.
11. Hooned ja rajatised (ehitusplatsid)
- 11.1. Metallkonstruktsioonid
- 11.2. Betoon- ja raudbetoonkonstruktsioonid
- 11.3. Kivi- ja armeeritud kivikonstruktsioonid
Õppige saama veadetektoriks
Loomulikult peaks veadetektori töö põhinema laialdastel teadmistel, mida saab omandada veadetektori kursustel. Akustilise emissiooni NDT meetodi veadetektori eriala koolitust Moskvas viivad läbi spetsiaalsed sõltumatud asutused mittepurustava testimissüsteemi personali sertifitseerimiseks. Pärast hariduse omandamist atesteeritakse veadetektor, mille tulemuste põhjal väljastatakse veadetektori inseneri tunnistus. Meie ettevõte aitab teid ja teie töötajaid õppige olema vigade tuvastaja erinevat tüüpi, antud juhul akustilise emissiooni NDT meetodi veadetektor, tootmist katkestamata.
Miks vajate veadetektori sertifikaati?
Vastavalt nõuetele peavad kõik mittepurustavate katsete spetsialistid (tõrkedetektorid) läbima sertifitseerimise, kui nad viivad punktis 17 sätestatud meetoditega läbi katseid 1. lisaga kehtestatud rajatistes.
Ettevõtetel ja organisatsioonidel, kes teostavad mittepurustavaid katseid kõrgendatud ohuga seotud tootmisruumides hoonete ja rajatiste, samuti nende osade ja tehniliste seadmete tehnilise diagnostika, remondi, rekonstrueerimise ajal, peavad läbi viima oma spetsialistide atesteerimise. Samuti peavad personali sertifitseerimise ja täiendõppega tegelevad organisatsioonid läbima mittepurustava katsesüsteemi personali sertifitseerimise spetsiaalsetes sõltumatutes asutustes.
3 veadetektori kvalifikatsiooni taset:
I kvalifikatsioonitase- NDT spetsialist oskuste, teadmiste ja oskustega vastavalt lisa 4 punktile 1.2.
Kvalifikatsioonitasemega I NDT spetsialist saab teostada töid teatud objektide mittepurustavatel katsetel teatud NDT meetodil, vastavalt juhistele, järgides rangelt NDT tehnoloogiat ja metoodikat ning temast kõrgema kvalifikatsioonitasemega personali järelevalve all.
I taseme veadetektori kohustused hõlmavad järgmist:
- NDT läbiviimiseks kasutatavate seadmete seadistamine sobival meetodil;
- NDT läbiviimine sertifitseeritud meetodil;
- vaatluse ja kontrolli tulemuste kirjeldus.
I kvalifikatsioonitaseme spetsialist ei saa teostama sõltumatut NDT meetodi, seadmete, tehnoloogia ja juhtimisrežiimi valikut ning hindama kontrolli tulemusi.
II kvalifikatsioonitase- NDT spetsialist, kellel on teadmised, oskused ja võimed vastavalt 4. liite punktidele 2.2 ja 2.3.
II taseme kvalifikatsiooniga NDT spetsialist oskab teha töid mittepurustava testimisega, omab piisavat kvalifikatsiooni NDT juhtimiseks vastavalt regulatiivsele ja tehnilisele dokumentatsioonile, kontrollimeetodi valimiseks ja meetodi rakendusala piiramiseks. Seadistab seadmeid, hindab objekti või elemendi kvaliteeti vastavalt dokumentidele, dokumenteerib saadud tulemusi, töötab välja juhendid ja erinevad dokumendid konkreetsetele toodetele selle sertifitseerimise valdkonnas, valmistab ette ja juhib I taseme spetsialiste. NDT teise taseme kvalifikatsiooni spetsialist valib tehnoloogia ja juhtimisvahendid, teeb kontrolli tulemuste põhjal järelduse, mille viib läbi ise või esimese taseme NDT spetsialist.
III kvalifikatsioonitase- NDT spetsialist teadmiste, oskuste ja vilumustega vastavalt lisa 4 punktile 3.
III kvalifikatsioonitaseme NDT spetsialist omab kvalifikatsiooni, mis on vajalik NDT meetodil tehtavate toimingute juhtimiseks, mille jaoks ta on sertifitseeritud, ning valib iseseisvalt NDT meetodid ja tehnikad, personali ja seadmed. Juhib I ja II taseme personali tööd ning teeb nende tasandite vastutusalasse kuuluvaid töid. Kontrollib ja koordineerib II taseme spetsialistide poolt välja töötatud tehnoloogilist dokumentatsiooni. Tegeleb NDT metoodiliste dokumentide ja tehniliste eeskirjade väljatöötamisega, samuti kontrollitulemuste hindamise ja tõlgendamisega. Osaleb sõltumatu asutuse volituse korral I, II, III taseme personali väljaõppes ja sertifitseerimises. Kontrollib I ja astme personali tehtud töid, valib tehnoloogia ja juhtimisvahendid, teeb selle tulemuste põhjal järelduse, mille tegi ise või tema juhendamisel I taseme spetsialist.
Samuti on erinevaid veaotsijate ridadesse, mille nad saavad otse ettevõtetelt, kus nad töötavad.
Koolitusel võite osaleda olenemata sellest, milline kvalifikatsioon teil praegu on. Kui teil on oma erialal juba töökogemus ja soovite tõsta oma staatust 6. klassi veadetektoriks, peate läbima veatuvastajate täiendkoolituse. Ebapiisava kogemuse ja teadmistega spetsialistidele on olemas kursused, mis pakuvad veadetektorite erialast koolitust, kus saab õppida veadetektoriks saama "nullist".
TÄHTIS
Et tegeleda töötaja mittepurustava testimise akustilise emissiooni meetodi mittepurustava testimisega on vaja saada arsti arvamus terapeut ja oftalmoloog, tervisliku seisundi kohta.
Kehtivus veadetektori sertifitseerimine tase I, II - 3 aastat, tase III - 5 aastat alates sertifitseerimise kuupäevast.
Hindveadetektori sertifikaadid arvutatakse ainult taotlemisel, lähtudes töödest ja tegevusliikidest, mille jaoks sertifitseeritakse!
B.S. Kabanov, V.P. Gomera, V.L. Sokolov, A.A. Okhotnikov, “KIRISHINEFTEORGSINTEZ”
Sissejuhatus
Kirishinefteorgsintez oli esimene naftatöötlemistehas Venemaal, mis võttis oma tehnilise diagnostika labori struktuuri AE rühma. Sel ajal kasutati peamiselt AE meetodit teadusorganisatsioonid ja uurimiskeskused. Tööstusorganisatsioonid kasutasid vajaduse korral nende keskuste teenuseid.
Arvestades AE kasutamise väljavaateid protsessiseadmete töökindluse parandamiseks ning soovides suurendada AE kasutamise mahtu ja efektiivsust, otsustas mehaanikateenistuse juhtkond luua oma AE grupi. Tänapäeval käib AE kaasas kõige raskemates töötingimustes töötavate surveanumate hüdrotestimise ja pneumaatilise testimisega ning suurendab traditsiooniliste vigade tuvastamise meetodite kasutamise efektiivsust tänu nende meetodite kasutusala lokaliseerimisele. Lisaks on kõigi anumate pneumaatiliste katsetega tingimata kaasas AE. Venemaa kontrollireeglid lubavad hüdrotestide asemel anumate pneumaatilisi katseid teha ainult juhul, kui juhtimise ohutuse tagamiseks kasutatakse AE-d.
Sellise väljavahetamise vajadus tekib sageli, kuna tehas kasutab üsna palju anumaid, millesse nende anumate konstruktsiooniomaduste tõttu (näiteks katalüsaatori olemasolu reaktorites) ei saa vett sisse lasta. Katsete tulemusel saadud andmete analüüsimiseks kasutatakse peamiselt traditsioonilisi kriteeriume: signaali asukoht, Kaiseri efekt, rõhu kokkupuude jne. Lisaks kasutatakse andmete analüüsimisel sellist meetodit nagu AE allikate asukoht, võttes arvesse muutuvaid väärtusi signaali levimise kiirus suhteliselt õhukestes kestades (erinevad Lamb-lainete režiimid). Kasutatakse ka mõningaid klasteranalüüsi algoritme. Alates 1992. aastast on testitud 205 laeva.
Katsetulemuste põhjal teostati ennetav remont 29 laeval. Kõigi analüüside töötlemise tulemuste põhjal moodustatakse veresoonte AE kontrolli andmebaas. Esimene AE süsteem, mida meie ettevõttes kasutati, oli LOCAN AT firmalt PAC. Seda süsteemi kasutatakse ka tänapäeval. Lisaks omandas meie organisatsioon 1998. aastal Vallen Systeme ettevõttelt AMSY4 süsteemi, et parandada AE kvaliteeti suurte laevade jälgimisel ja võttes arvesse AE süsteemide arendamise edusamme.
Näited AE kasutamisest veresoonte jälgimiseks
Et kinnitada väitekirja AE kasutamise efektiivsuse kohta naftarafineerimistehase seadmete diagnoosimisel, toome mitu reaalset näidet defektide tuvastamisest. Kõigis nendes näidetes oli defektide tuvastamise tõenäosus ilma AE-d kasutamata, kasutades ainult traditsioonilisi kontrollimeetodeid, väga väike. Tulemused saadi AMSY4 süsteemi abil.
NÄIDE 1
Juhtimise objektiks on soojusvaheti korpus, materjal - roostevaba teraskattega süsinikteras, paksus - 20 mm, pneumaatiline testimine (eskiis on näidatud joonisel 1). Tasapinnalise asukoha tulemused on näidatud joonisel 2. Neid kasutati järgnevaks analüüsiks suure AE allikate kontsentratsiooniga veresoone keha pindala määramiseks. Seejärel viidi muude andmete järeltöötlusvahendite abil läbi AE tegevustsoonide täpsem lokaliseerimine ja klassifitseerimine. Sellise analüüsi elementide näited on toodud joonisel 3. Amplituudi sõltuvus loendustest kolme kanali puhul, mis on näidatud vasakpoolsel graafikul (näidatud erinevate kanalite puhul erinevate värvidega) näitab kanalil 14 salvestatud suuremate amplituudide olemasolu võrreldes kanalitega 6 ja 13 (mis on piisav põhjus mitte piirata formaalse asukoha määramise tulemustele ja viitab asukohaantenni vaadeldavas fragmendis asuva AE allikate rühma andmete täiendava analüüsi vajadusele).
Kõrge amplituudiga impulsside olemasolu 14 juures näitab, et anduri paigalduskoha vahetus läheduses võib olla AE allikas. Parempoolne graafik joonisel 3 illustreerib tõusuaja teabe kasutamist tasapinnalise asukoha tulemuste tõlgendamiseks.
AE allikaid sisaldavate tsoonide lokaliseerimise lõpptulemused ja AE andurite asukoht veresoone skaneerimisel on näidatud joonisel 4. Näidatud AE aktiivsuse tsoonid klassifitseeriti vastavalt neid moodustavate AE allikate olemusele järgmiselt: 1. tsoon on seotud keha ja fikseeritud toe vahelise keevisliidese pingete lõdvestumisprotsessidega; Tsoonid 2 ja 3 moodustati signaalide salvestamise tulemusena, mis kaasnesid lõdvestusprotsessidega siseseadmete keevitamise tsoonides anuma keha külge. (Tuleb märkida, et lõdvestusprotsessid tsoonides 2 ja 3 korreleerusid reeglina üksteisega, seega moodustasid erinevatest allikatest pärit signaalid superpositsioonid; superpositsiooniandmed salvestasid andurid asukoharühmast, mille moodustasid kanalid ## 13,14 ,6,10 ja sellest tulenevalt olid tasapinnalise asukoha formaalsed tulemused joonisel 2 esitatud kujul. Tsoonis 4 (piirkonnas, kus asub andur nr 14) avastati traditsiooniliste testimismeetoditega tehtud lisatestide tulemuste põhjal ohtlik defekt (8-10 mm sügavune ümmargune pragu 8-10 mm sügavusega keevisõmbluses pimeda ülaosa ümber. läbimõõt 45 mm koos juurdepääsuga kesta pikiõmblusele), tekkis korrosioonipragude tagajärjel.
| Joonis 2. 2. tsoonile vastava asukohaklastri parameetrid. |
|
Joonis 3. Mõned sõltuvused, mida kasutatakse näite 1 andmete analüüsimisel: loendused vs. korrelatsioonid. Võimendi ja tõusuaeg vs. Võimendi kanalitele ## 6,13,14 |
|
Joonis 4. Juhtmuundurite paigutus soojusvaheti korpuse väljatöötamisel (näide 1), vaade seestpoolt. Näidatud on kõige aktiivsemate AE allikate tsoonid. |
 |


NÄIDE 2
Kontrolliobjektiks on vertikaalne anum, mis asub teise veresoonega samas kehas. Anumad on eraldatud tasase tahke vaheseinaga (joonis 5). AE kontrolliga kaasnes ülemise anuma hüdrotestimine. Materjal - plaadistusega süsinikteras, seina paksus - 16 mm.
Töökoormuste tagajärjel tekkis vaheseina perimeetril mitmes punktis perforatsioon: kere ja vaheseina vahele tekkisid keevisõmblusse läbivad praod. Need praod avanesid ainult sisemise rõhu tagajärjel ja seetõttu ei tuvastatud neid traditsiooniliste kontrollimeetoditega laeva seiskamise ajal.
AE kasutamine laeva hüdrotestimisel võimaldas neid defekte tuvastada. Mõnede alumisest tsoonist pärit andurite signaalide impulsi karakteristikud olid lekkeid registreerivatele signaalidele iseloomulikud (mõned impulsi karakteristikud on toodud joonisel 6). Visuaalselt – korpuse välisküljelt – aga lekkeid ei esinenud. Lisaks ei tuvastanud vaheseina ja kere keevisliidete eelkontroll muude meetoditega defekte.
Täiendav informatsioon ülesande lahendamiseks saadi lainekuju visualiseerimise funktsioonide abil, mida kasutati AE allika tüübi kvalitatiivseks hindamiseks lainekujude põhjal.
Joonisel 7 on näide tüüpiliste signaalide salvestamisest kahe erineva anduri jaoks erinevat laadi allikatest. Andur nr 4 asus väikeste korrosioonidefektidega keevisõmbluse ala lähedal.
Andur nr 3 asus vaheseina lähedal (vt joonis 5) ja registreeris perioodilisi lekkeid läbi ühendusõmbluse pragude.
Tuleb märkida, et ka alumine anum oli täidetud veega (valmistatud hüdrotestimiseks). See asjaolu aitas kaasa Lisafunktsioonid salvestatud andmete olemuses: ülemisse anumasse pumbatud vesi suurendas selles rõhku, kuni perforatsioonikoha pinge ületas pragude avanemiseks vajaliku väärtuse. Selle tulemusena sisenes ülemisest anumast vesi läbi pragude alumisse ja suurendas selles survet samale väärtusele kui ülemises anumas. See asjaolu tekitas andmestruktuuris täiendavaid häireid.
Siiski võib AE kasutamine selliste probleemide lahendamiseks olla optimaalne. Igal juhul oli vaadeldavas näites võimalik edukalt määrata kõigi defektide tüüp ja nende asukoht.
Joonis 7. Näited signaalidest, mis on salvestatud lekkest (Chan.3) ja korrosioonipragudest (Chan.4) |
|
|
|
|
 |  |


Joonis 8. Sfäärilise anuma korpuse defekti asukoha määramine sfäärilise asukoha algoritmide abil |
|
Joonis 9. Näited graafilistest vormidest, mida kasutatakse korrosioonidefekte sisaldava sfäärilise mahuti korpuse tsooni lokaliseerimiseks (õmbluse osa pikkusega 800 mm) (kasutades tsooni paigutuse põhimõtteid) |
 |

NÄIDE 3
AE efektiivsus on kõrge raskesti ligipääsetavate aladega suurte laevade puhul. Selliste laevade puhul on kõige tõhusam kasutada AMSY4 süsteemi pakutavate erinevate asukohaalgoritmide kombinatsiooni.Näiteks kerakujulise anuma jälgimiseks saadi häid tulemusi sfäärilise ja tsoonilise asukoha kombinatsiooniga.
Laeva omadused: materjal - süsinikteras, paksus - 16 mm, läbimõõt - 10500 mm, maht - 600 kuupmeetrit. AE-ga kaasnes laeva hüdrotestimine. Kontrolli tulemusena tuvastati laeva kerel kaks korrosioonidefekte sisaldavat tsooni. Üks tsoonidest tuvastati sfäärilise asukoha tulemuste põhjal (joonis 8). Teine tsoon (õmbluse pindala) määrati tsooni asukoha põhimõtete järgi. Mõned andmed, mis iseloomustavad selles tsoonis asuva anduri nr 8 kõrget suhtelist aktiivsust, on näidatud joonisel 9.
Seejärel kinnitati AE tulemused ultrahelikontrolliga. ja parandati laevakere defektseid kohti.
Järeldus
Nüüd on Kirishinefteorgsintezi AE-meetod kaasatud ettevõtte mittepurustava testimise üldstruktuuri ja täiendab edukalt traditsioonilisi meetodeid.
Organisatsiooni juhtkond, arvestades AE kasutamise efektiivsust, suurendab selle kasutamise mahtu ja jätkab investeerimist AE arendamisse ettevõttes.
GOST R ISO 22096-2015
VENEMAA FÖDERATSIOONI RIIKLIKU STANDARD
Masina seisukorra jälgimine ja diagnostika
AKUSTILISE EMISSIONE MEETOD
Masinate seisukorra jälgimine ja diagnostika. Akustilise emissiooni meetod
OKS 17.140.20
17.160
Tutvustuse kuupäev 2016-12-01
Eessõna
Eessõna
1 KOOSTATUD Avatud Aktsiaselts "Tehniliste süsteemide Juhtimise ja Diagnostika Uurimiskeskus" (JSC "SRC KD"), tuginedes lõikes 4 nimetatud standardi ingliskeelsele versioonile tema enda tõlkele vene keelde.
2 TUTVUSTAS Standardimise Tehniline Komitee TC 183 "Vibratsiooni, löökide ja tehnilise seisukorra jälgimine"
3 KINNITUD JA JÕUSTUNUD föderaalse tehniliste eeskirjade ja metroloogiaameti 20. oktoobri 2015. aasta määrusega N 1583-st
4 See standard on identne rahvusvahelise standardiga ISO 22096:2007* “Masinate seisukorra jälgimine ja diagnostika – Akustiline emissioon” (IDT).
________________
* Juurdepääsu tekstis mainitud rahvusvahelistele ja välismaistele dokumentidele saab klienditoega ühendust võttes. - Andmebaasi tootja märkus.
Selle standardi nimetust on muudetud määratletud rahvusvahelise standardi nimetuse suhtes, et viia see vastavusse GOST R 1.5-2012 nõuetega (punkt 3.5).
Selle standardi rakendamisel on soovitatav kasutada rahvusvaheliste viitestandardite asemel vastavaid siseriiklikke standardeid, mille kohta on teave toodud lisalisas JAH
5 ESIMEST KORDA TUTVUSTATUD
6 VABARIIK. märts 2019
Selle standardi rakendamise eeskirjad on kehtestatud aastal 29. juuni 2015. aasta föderaalseaduse N 162-FZ "Vene Föderatsiooni standardimise kohta" artikkel 26 . Teave käesoleva standardi muudatuste kohta avaldatakse iga-aastases (jooksva aasta 1. jaanuari seisuga) teabeindeksis "Riiklikud standardid" ning muudatuste ja muudatuste ametlik tekst avaldatakse igakuises teabeindeksis "Riigistandardid". Käesoleva standardi läbivaatamise (asendamise) või tühistamise korral avaldatakse vastav teade igakuise teabeindeksi "Riiklikud standardid" järgmises numbris. Asjakohane teave, teated ja tekstid on postitatud ka avalikku infosüsteemi - föderaalse tehniliste eeskirjade ja metroloogiaameti ametlikule veebisaidile Internetis (www.gost.ru)
Sissejuhatus
Akustilise emissiooni meetodi abil saab jälgida masinate seisukorda ja teha diagnostikat kas iseseisvalt või kombineeritult teiste meetoditega, näiteks masinate vibratsioonisignaalide või soojuskiirguse analüüsi põhjal. Meetodit saab rakendada statsionaarsete, poolstatsionaarsete ja kaasaskantavate mõõtesüsteemide abil, olenevalt uuritavate objektide kriitilisuse astmest. Tavaliselt sisaldab mõõtesüsteem muundureid, signaalivõimendeid, filtreid ja andmehõiveseadmeid. Sõltuvalt meetodi eesmärgist võib kasutada akustilise emissiooni signaali erinevaid omadusi.
1 kasutusala
See standard täpsustab üldised põhimõtted akustilise emissiooni meetodi rakendamine erinevates režiimides ja erinevates töötingimustes töötavate masinate seisundi jälgimiseks ja diagnoosimiseks. Meetod kehtib igat tüüpi masinate puhul ja põhineb ainult nende signaalide mõõtmisel, mis levivad kogu masina struktuuris.
2 Normatiivviited
See standard kasutab normatiivseid viiteid järgmistele standarditele:
ISO 2041, Mehaaniline vibratsioon, põrutus- ja seisundiseire – Sõnavara
ISO 12716, mittepurustav katse – akustilise emissiooni kontroll – sõnavara
ISO 13372, Masinate seisukorra jälgimine ja diagnostika – Sõnavara
ISO 18436-6, Masinate seisukorra jälgimine ja diagnostika. Nõuded personali kvalifikatsioonile ja hindamisele. Osa 6: Akustiline emissioon
3 Mõisted ja määratlused
See standard kasutab termineid ISO 2041, ISO 12716, ISO 13372 ja järgmisi termineid koos vastavate määratlustega.
3.1 akustilised emissioonid (masinate seisukorra jälgimine)(akustiline emissioon): nähtuste klass, mis põhjustab lainete ilmnemist, mis levivad läbi konstruktsiooni või keskkonnas (vedelikud, gaasid) materjali sees või pinnal paiknevatest lokaalsetest allikatest kiirete energia vabanemise protsesside tõttu.
Märkus 1. Energia eraldumine võib tuleneda sellistest protsessidest nagu pragude levimine materjalis, kokkupuutuvate masinaosade hõõrdumine, kokkupõrked masinaosade vahel või materjali lekkimine.
Märkus 2. See määratlus on sõnastatud võimalikult üldisel kujul, et kajastada erinevaid võimalusi kasutada akustilise emissiooni meetodit masinate seisukorra jälgimiseks. erinevad tüübid.
3.2 akustilise emissiooni kontroll (masinate seisukorra jälgimine)(akustilise emissiooni monitooring): akustiliste emissioonide andmete tuvastamine ja kogumine, mis võimaldab hinnata masina seisukorda.
Märkus. See määratlus kehtib ainult masina seisundi jälgimise valdkonnas.
3.3 akustilise emissiooni muundur(akustilise emissiooni andur/vastuvõtja): seade, mis võimaldab muuta elastselaine liikumise elektrisignaaliks.
3.4 akustiline emissiooni signaal(akustilise emissiooni signaal): elektriline signaal akustilise emissiooni muunduri väljundis, mis on seotud akustilise kiirguse allika akustilise lainega.
3.5 akustiliste emissioonide omadused(akustilise emissiooni karakteristikud): karakteristikute kogum, mis kirjeldab antud masina akustilist emissiooni või akustilise emissiooni allikat.
Märkus. Kirjeldatud akustilisest emissioonist põhjustatud laineprotsess võib olla impulss- või pidevat tüüpi.
3.6 akustilise emissiooni lainejuht(akustilise emissiooni lainejuht): seade, mille kaudu akustiline laine levib allikast akustilise emissiooni muundurisse.
3.7 taustamüra(taustamüra): akustilise kiirgussignaali valekomponent, mis ei ole seotud masina juhitavates komponentides toimuva akustilise emissiooni protsessiga.
MÄRKUS Taustmüra võib olla elektriliste, termiliste või mehaaniliste protsesside põhjustatud signaal.
3.8 kontaktikandja(couplant): AEC-testiobjekti ja AEC-muunduri vaheline keskkond, mida kasutatakse akustilise laine edastamise parandamiseks.
Näited – õli, rasv, liimvuuk, vesiemulsioonlõikepasta, vaha.
3.9 Suh-Nielseni matkija(Hsu-Nielseni allikas): Seade grafiidist pliiatsijuhtme paigaldamiseks ja purustamiseks, et simuleerida kunstlikult akustilise laine akustilise emissiooni ja ergastamise protsessi.
Märkus – Akustiline laine sõltub kasutatavast vardast. Tavaliselt kasutatakse varda kõvadusega 2H läbimõõduga 0,5 mm (lubatud on 0,3 mm) ja pikkusega (3,0 ± 0,5) mm.
3.10 auto(masin): mehaaniline süsteem, mis on loodud konkreetsete ülesannete täitmiseks (materjali moodustamine, liikumise, jõu või energia edastamine ja muundamine).
3.11 masinaüksus(masinasüsteem): mehaaniline süsteem, mille põhielemendiks on üks masin (vt punkt 3.10) ja mis sisaldab ka abielemente, mis on kavandatud selle masina toimimist toetama.
4 Akustilise emissiooni meetodi põhimõtted
4.1 Akustilise emissiooni nähtus
Akustilised emissioonid võivad tekkida materjalide sees või pinnal. See nähtus seisneb energia spontaanses vabanemises, mis väljendub elastsete lainete levimise vormis. Akustiline emissioon materjali sees avaldub elastsete lainete kaudu materjali pinnal laias sagedusvahemikus (tavaliselt 20 kHz kuni 1 MHz).
Akustiliste emissiooniprotsessidega seotud elastsed lained tuvastatakse spetsiaalsete andurite abil, mis näitavad materjali pinnal olevate punktide liikumist elektrilisteks signaalideks. Neid signaale muudetakse ja töödeldakse seejärel asjakohaselt, et saada teavet kontrollitava objekti oleku kohta ja varakult tuvastada objekti mehaanilise ja struktuurse terviklikkuse kadumise protsesse. Elektrilise signaali kuju sõltub materjali sees ja/või pinnal tekitatud akustiliste lainete levimisteedest ja kujudest. Seetõttu võivad samadest allikatest saadavad akustilised emissioonisignaalid olenevalt akustiliste lainete teekonnast olla erinevad.
4.2 Meetodi eelised ja piirangud
Meetodi eelised on järgmised:
a) andmete hankimine kontrollitava objekti kujundust segamata;
b) andmete saamine reaalajas;
c) kõrge tundlikkus, mis võimaldab varasemat (näiteks vibratsioonimeetodiga võrreldes) tuvastamist;
d) võime kontrollida objekti dünaamilist käitumist;
e) rakendatavus laias pöörlemiskiiruse vahemikus, mis võimaldab juhtimist, sealhulgas väikese kiirusega masinaid (rootori kiirusega alla 60 min);
f) võime tuvastada kulumis- ja hõõrdeprotsesse, näiteks külgnevate masinaelementide ühenduste lõtvumisel või määrimistingimuste halvenemise tõttu.
Meetodi piirangud on seotud:
- akustiliste lainete kiire sumbumine masina konstruktsiooni läbimisel;
- suur sõltuvus taustamürast;
- akustiliste emissioonide omaduste ja masina rikkemehhanismi täpse võrdlemise võimatus.
5 Akustilise emissiooni meetodi rakendamine
5.1 Masina seisukorra jälgimine
Akustilise emissiooni meetodit saab rakendada paljude masinate puhul tingimusel, et läbi masina konstruktsioonielementide on akustilise laine ülekandetee huvipakkuvast katseobjektist akustilise emissiooni andurini. Tabelis 1 on toodud mõned näited erinevat tüüpi masinate riketest, mida saab selle meetodi abil tuvastada. Seisundit ei hinnata mitte akustilise kiirgussignaali parameetrite absoluutväärtuste, vaid nende muutuste järgi masina antud töörežiimis.
Tabel 1 – Näited akustilise emissiooni meetodi kasutamisest masinate seisukorra jälgimiseks
Masina tüüp | Talitlushäired |
||||||
Äärmusvead | Isti- | Saastunud | Nesoos- | Kandmise defektid | Protsessid (leke, muutus- |
||
Pumbad | |||||||
Käigukastid | |||||||
Elektrimootorid | |||||||
Auruturbiinid | |||||||
Gaasiturbiinid | |||||||
Elektrigeneraatorid | |||||||
Diiselmootorid | |||||||
Töötlemiskeskused | |||||||
Ventilaatorid, puhurid | |||||||
Madala kiirusega pöörlevad masinad (alla 60 min) | |||||||
Masina komponendid (ventiilid, soojusvahetid) | |||||||
Kompressorid | |||||||
Näiteks signaali üldise taseme tõus masina püsivas töörežiimis näitab selle tehnilise seisukorra halvenemist. Signaali moduleerimine ühel põhilisel laagrisagedusel on märk varajases staadiumis laagrikahjustusest, mida ei pruugi vibratsiooni- ja löögiimpulsside vaatlustega veel tuvastada. Tuleb märkida, et akustilise emissiooni aktiivsus võib erinevate masinate, erinevate töötingimuste ja erinevate koormuste korral olla erinev.
5.2 Mõjutegurid
Enne akustiliste emissioonide mõõtmist on oluline veenduda, et tulemusi ei mõjutaks väline müra, näiteks elektroonikaseadmete müra (raadiosageduslikud elektromagnetväljad), õhumüra (gaasijugade või masinate löökidega). peened osakesed, mida tõstab tuul), masina tööprotsesside müra (vedelik voolab torudes) ja mehaaniline taustmüra.
6 Andmete kogumine
6.1 Süsteemi installimine
Tüüpiline akustilise emissiooni andmete kogumissüsteemi skeem on näidatud joonisel 1. Tavaliselt paigaldatakse andur uuritavale masinale ja ühendatakse eelvõimendiga, mille väljund on ühendatud andmehõiveseadme sisendiga. Mõnel akustilise emissiooni muunduril on sisseehitatud eelvõimendid. Andmeid kogutakse masina töötamise ajal. Nende edasise analüüsi ulatus ja sügavus sõltuvad konkreetsest rakendusest. Süsteemi saab valmistada statsionaarse, poolstatsionaarse või kaasaskantava versioonina.
Joonis 1 – andmete kogumissüsteemi skemaatiline esitus
6.2 Mõõteriistad
Akustilise emissiooni tekitatud laine tuvastamine on mõõtmise kõige kriitilisem osa, seega tuleb võtta kõik ettevaatusabinõud, et tagada hea tee, sealhulgas impedantsi sobitamine liidestes. Samuti tuleb arvestada sagedusfiltrite, muundurite, diskreetimissageduste jms vale valiku tagajärgedega. Nõuded mõõteriistadele ja nende kalibreerimisele saab võtta , , , . Konverteri valimisel tuleks arvestada selle mõõtmete, teisendussuhte, sageduskarakteristiku ja rakendustingimustega. Mõnel juhul, näiteks suurte laagrite kontrollimisel, võib akustiliste emissioonide allikate tuvastamiseks olla vajalik mitme anduri kasutamine. Akustilise emissiooni allika lokaliseerimist saab läbi viia mitmel viisil, sealhulgas akustilise laine muunduritele saabumisaegade arvutamisel.
6.3 Konverterite paigaldamine ja kontaktkandjate kasutamine
Masina seisukorra jälgimiseks akustilise emissiooni meetodi kasutamisel on oluline tagada, et andur oleks sobiva kontaktmeediumi abil kindlalt paigaldatud paigalduskohta. Kinnitamiseks võib kasutada mehaanilisi seadmeid (luues kinnitusjõu läbi magneti, mehaanilise klambri jne) või liimmaterjale. Viimasel juhul on kleepuvaks materjaliks kontaktkeskkond.
Akustilise emissiooni anduri asend peab tagama, et akustilise laine jaoks on olemas teekond läbi masina konstruktsioonielementide. See tee võib sisaldada katkestusi (neid katkestusi peetakse piirideks kahe elemendi vahel, näiteks poldi pea ja klambriga osa vahel), kuid külgnevate elementide vahel peab olema kontakt, kas mehaaniliselt või kontaktmeediumi kaudu (näide oleks levimistee läbi laagri libisemise, kus laagris olev määrdeaine ja jahutusõli toimivad kontaktkeskkonnana). Inverteri paigalduskoht peab olema puhas. Akustilise laine edastamise parandamiseks võite anduri paigalduskohast eemaldada kõik värvikihid kuni metallpinnani välja, kuid tuleb jälgida, et see toiming ei halvendaks masina tehnilist seisukorda. Tuleb võtta kasutusele kõik võimalikud abinõud, et anduri kontaktpind sobiks tihedalt paigalduspinnaga, s.t. viimane peab olema sile, puhas ja pragudeta. Akustilise lainetee kvaliteedi parandamine parandab mõõtmistulemuste korratavust.
Teatud juhtudel võib muunduri paigaldada akustilise emissiooni lainejuhi sisse. Tavaliselt kasutatakse lainejuhti, et tagada otsesem lainetee vaadeldava objekti akustilise emissiooni allikast andurini ning samuti vähendada temperatuuri mõju andurile. Lainejuht võib muuta akustilise laine omadusi (amplituudi, kuju jne).
Kontaktmeediumi kasutamisel kantakse väike kogus selle ala keskele, kuhu muundur tuleb paigaldada. Seejärel surutakse muundur tihedalt pinnale ja kontaktaine jaotub ühtlaselt kogu kontaktpinnale. Konverteri muunduskoefitsient võib sõltuda kontaktkeskkonna paksusest.
Kui kontaktmeediumi kasutamine on praktilistel põhjustel ebaotstarbekas, kasutatakse kuiva kontakti. Vajalik survejõud määratakse eksperimentaalselt, näiteks Su-Nielseni simulaatori abil. Veenduge, et muunduri kontaktpinna ja paigalduspinna vahel ei oleks tühimikke.
Liimiva kontaktmeediumi kasutamisel peate tagama, et anduri ja paigalduspinna vahel tekkiv side ei puruneks võimaliku pinna deformatsiooni, soojuspaisumise või mehaanilise pinge tõttu. Liimiaine omadused konkreetsetes kasutustingimustes peavad olema teada.
Märkus. Liimikihi enda lõhenemine põhjustab akustiliste signaalide ilmumist.
Elektrilise taustmüra vältimiseks peab muundur olema elektriliselt isoleeritud.
7 Esialgne teave
Mõõtmiste ettevalmistamine ja nende teostamine eeldab teadmisi:
- sõiduki identifitseerimisandmed (selle nimi ja number);
- töörežiim (koormus, kiirus, temperatuur jne);
- kasutus- ja hoolduslugu;
- masina projekteerimine;
- selle rikete või rikete ajalugu;
- varasemad akustilise emissiooni mõõtmise andmed.
Mõõtmistulemuste õigeks tõlgendamiseks on vajalik asjakohane eksperimentaalne andmebaas või teadmised masina tavapärastele kasutustingimustele vastavast algtasemest. Põhitase tähistab jälgitavate parameetrite kogumi väärtusi, mis saadakse siis, kui on teada, et masin on tehniliselt heas seisukorras ja töötab stabiilses režiimis. Võimalike kõrvalekallete tuvastamiseks võrreldakse järgnevate mõõtmiste tulemusi baasjoonega.
Mitmes režiimis töötavate masinate jaoks saab määrata mitu võrdlustaset – üks iga juhitava režiimi jaoks. Masinatele, mis on kasutusele võetud pärast ostmist või remonti, võib kehtestada sissemurdmisaja. Sellel perioodil (mitu päeva või nädalat) võib täheldada muutusi jälgitavates parameetrites. Sissetöötamise perioodil tehtud mõõtmiste tulemusi ei tohiks kasutada lähtetaseme moodustamiseks. Baastaseme saab määrata ka seadmetele, mis on olnud töös pikka aega, kuid mille puhul alles hakatakse akustilise emissiooni testimise meetodit rakendama.
8 Andmete analüüs ja tulemuste esitamine
Analüüsi põhieesmärk on luua seos akustilise emissiooni karakteristikute ja masina töötingimuste vahel, mõõtes kõrvalekaldeid algtasemest, et teha kindlaks masina seisukord.
Akustilise emissiooni meetodil masinate seisukorra jälgimisel kasutatavad kriteeriumid võivad olla järgmised:
a) akustiliste emissiooniallikate aktiivsuse suurenemine aja jooksul;
b) akustilise emissiooni karakteristikute väärtused masina püsivas töörežiimis;
c) akustilise emissiooni ilmnemine signaalis iseloomulikud tunnused, puudub masina hea tehnilise seisukorra korral;
d) mõõtevahendite tootja poolt määratletud instrumentaalsed erikriteeriumid;
e) akustilise emissioonisignaali amplituudmodulatsiooni olemasolu antud defekti sageduskarakteristikuga.
9 Protseduurid
Akustilise emissiooni meetodi edukas rakendamine on võimatu ilma kontrollitavate parameetrite regulaarsete täpsete mõõtmisteta. See nõuab töötajatelt dokumenteeritud testimisprotseduuride väljatöötamist, hindamist ja rakendamist ning nende protseduuride võimalike piirangute mõistmist. Akustilise emissiooni meetodit kasutava personali pädevusnõuded on määratletud standardis ISO 18436-6.
Lisa JAH (viide). Teave rahvusvaheliste võrdlusstandardite vastavuse kohta riiklikele standarditele
Rakendus JAH
(informatiivne)
Tabel DA.1
Rahvusvahelise võrdlusstandardi tähistus | Vastavuse aste | Vastava riikliku standardi tähistus ja nimetus |
Märkus – see tabel kasutab standarditele vastavuse määramiseks järgmist sümbolit: IDT – identsed standardid. |
||
Bibliograafia
ISO 17359, Masinate seisukorra jälgimine ja diagnostika – Üldjuhised |
|
EN 13477-1, Mittepurustav katse. Akustiline emissioon. Seadme iseloomustus. Osa 1: Seadme kirjeldus |
|
EN 13477-2, Mittepurustav katse. Akustiline emissioon. Seadme iseloomustus. Osa 2: Tööomaduste kontrollimine |
|
EN 13554, Mittepurustav katse. Akustiline emissioon. Üldpõhimõtted |
|
ASTM E976-05, standardjuhend akustilise emissiooni anduri reaktsiooni reprodutseeritavuse määramiseks |
|
ASTM E1106-86, akustiliste emissiooniandurite esmase kalibreerimise standardmeetod |
|
DSTU 4227, kriitiliste objektide akustilise emissiooni diagnostika juhised |
UDK 534.322.3.08:006.354 | ||
Märksõnad: masinad, akustiline emissioon, allikad, muundur, mõõteriistad, seisukorra jälgimine |
||
Elektroonilise dokumendi tekst
koostatud Kodeks JSC poolt ja kontrollitud:
ametlik väljaanne
M.: Standartinform, 2019
Akustiliste emissioonide allikad
Peaaegu kõik materjalid tekitavad hävitamisel heli (19. sajandi keskpaigast tuntud tina kisa, puidu, jää jne purunemise praksumine), st eraldavad kõrvaga tajutavaid akustilisi laineid. Enamik konstruktsioonimaterjale (näiteks paljud metallid ja komposiitmaterjalid) hakkavad koormamisel kiirgama akustilist vibratsiooni spektri ultraheli (kuuldamatu) osas, juba ammu enne riket. Nende lainete uurimine ja salvestamine sai võimalikuks spetsiaalse varustuse loomisega. Sellesuunaline töö hakkas eriti intensiivselt arenema alates 20. sajandi 60. aastate keskpaigast. tulenevalt vajadusest juhtida eriti kriitilisi tehnilisi objekte: tuumareaktoreid ja tuumaelektrijaamade torustikke, raketikere jne.
Akustiline emissioon (emissioon - emissioon, genereerimine) tähendab elastsete lainete esinemist keskkonnas, mis on põhjustatud selle oleku muutumisest väliste või sisemiste tegurite mõjul. Akustilise emissiooni meetod põhineb nende lainete analüüsil ja on üks passiivseid akustilise seire meetodeid. Vastavalt standardile GOST 27655-88 “Akustiline emissioon. Mõisted, määratlused ja tähistused” Akustilise emissiooni (AE) ergastamise mehhanism on katseobjektis toimuvate füüsikaliste ja (või) keemiliste protsesside kogum. Sõltuvalt protsessi tüübist jaguneb AE järgmisteks tüüpideks:
· Materjali AE, mis on põhjustatud selle struktuuri dünaamilisest lokaalsest ümberstruktureerimisest;
· Hõõrdumine AE, mis on põhjustatud tahkete kehade pindade hõõrdumisest koormuse rakendamise kohtades ja liitekohtades, kus esinevad ühenduselementide vastavus;
· Lekke AE, mis on põhjustatud lekke kaudu voolava vedeliku või gaasi vastasmõjust lekke seinte ja ümbritseva õhuga;
· AE keemiliste või elektriliste reaktsioonide ajal, mis tulenevad vastavate reaktsioonide, sealhulgas korrosiooniprotsessidega kaasnevate reaktsioonide toimumisest;
· magnetiline ja kiirgus AE, mis tekivad vastavalt materjalide ümbermagnetiseerimisel (magnetmüra) või interaktsiooni tulemusena ioniseeriva kiirgusega;
AE põhjustatud faasimuutused ainetes ja materjalides.
Seega on AE nähtus, mis kaasneb peaaegu kõigi kehas toimuvate füüsikaliste protsessidega tahked ained ja nende pinnal. Võimalus salvestada mitut tüüpi AE-sid nende väiksuse tõttu, eriti kui need tekivad molekulaarne tase, kristallvõre defektide (dislokatsioonide) liikumise ajal on piiratud seadmete tundlikkusega, seetõttu on enamiku tööstusrajatiste, sealhulgas nafta- ja gaasitööstuse rajatiste AE seire praktikas kolm esimest AE tüüpi. kasutatud. Tuleb meeles pidada, et hõõrdumise AE tekitab müra, põhjustab valede defektide teket ja on üks peamisi AE meetodi kasutamist raskendavaid tegureid. Lisaks registreeritakse esimest tüüpi AE-st ainult tugevaimad signaalid defektide tekkimisest: pragude kasvu ja materjali plastilise deformatsiooni ajal. Viimane asjaolu annab AE-meetodile suure praktilise tähtsuse ja määrab selle laialdase kasutamise tehnilise diagnostika eesmärgil.
AE testimise eesmärk on tuvastada, määrata koordinaadid ja jälgida (jälgida) akustilise emissiooni allikaid, mis on seotud katkestustega katseobjekti pinnal või seina mahus, keevisliitmikus ning valmistatud osades ja komponentides. Kõiki AE allikatest põhjustatud märke tuleb võimaluse korral hinnata muude mittepurustavate katsemeetoditega.
AE signaalide tüübid
Tööstuslike seeriaseadmetega salvestatud AE jaguneb pidevaks ja diskreetseks. Pidev AE salvestatakse pideva laineväljana suure signaali kordussagedusega, diskreetne AE aga koosneb eraldi eristatavatest impulssidest, mille amplituud ületab mürataset. Pidev vastab metalli plastilisele deformatsioonile (voolule) või vedeliku või gaasi voolule lekete kaudu, mis on diskreetne pragude järsu kasvu suhtes.
Diskreetse AE kiirgusallika suurus on väike ja võrreldav kiiratavate lainete pikkusega. Seda saab kujutada kvaasipunktallikana, mis asub materjali pinnal või sees ja kiirgab sfäärilised lained või muud tüüpi lained. Kui lained interakteeruvad pinnaga (kahe meediumi vaheline liides), peegelduvad ja muunduvad. Materjali mahus levivad lained nõrgenevad sumbumise tõttu kiiresti. Pinnalained Need sumbuvad kaugusega palju vähem kui mahulised, mistõttu salvestavad need peamiselt AE-vastuvõtjad.
AE allika signaali registreerimine toimub samaaegselt konstantse või muutuva taseme müraga (joonis 10.1). Müra on üks peamisi AE kontrolli tõhusust vähendavaid tegureid. Erinevate põhjuste tõttu, mis nende välimust põhjustavad, liigitatakse müra vastavalt:
· genereerimismehhanism (päritoluallikas) - akustiline (mehaaniline) ja elektromagnetiline;
· mürasignaali tüüp – impulss- ja pidev;
· allika asukohad – välised ja sisemised. Peamised müraallikad objektide AE testimise ajal on:
· vedeliku pritsimine anumasse, anumasse või torujuhtmesse selle täitmisel;
· hüdrodünaamilised turbulentsed nähtused suurel laadimiskiirusel;
· hõõrdumine objekti ja tugede või vedrustuse kokkupuutepunktides, samuti painduvate ühenduste juures;
· pumpade, mootorite ja muude mehaaniliste seadmete töö;
· elektromagnetiliste häirete mõju;
· keskkonnamõju (vihm, tuul jne);
· AE muunduri oma soojusmüra ja võimendi (eelvõimendi) sisendastmete müra.
Müra summutamiseks ja kasuliku signaali isoleerimiseks kasutatakse tavaliselt kahte meetodit: amplituud ja sagedus. Amplituud seisneb eristusläve fikseeritud või ujuva taseme kehtestamises, millest allapoole seade AE signaale ei salvesta. Konstantsel tasemel müra olemasolul seatakse fikseeritud lävi, muutuval tasemel ujuv lävi. Ujuv lävi, mis seatakse automaatselt üldise mürataseme jälgimisega, võimaldab erinevalt fikseeritud väärtusest välistada osa mürasignaalide registreerimise AE-signaalina.

Joonis 1. Salvestatud AE signaali üldine diagramm müra taustal:
1 - võnkumised; 2 - ujuv lävi; 3 - võnkumised ilma ujukünnist arvestamata; 4 - müra

Joonis 10.2. Üldine vorm AE signaal seadme võimendustee väljundis:
1 - võnkumised; 2 - ümbrik; - amplituudi läviväärtus; - k-nda impulsi amplituud
Sagedusmüra summutamise meetod seisneb AE-vastuvõtjate poolt vastuvõetud signaali filtreerimises madal- ja kõrgsagedusfiltrite (LPF/HPF) abil. Sellisel juhul hinnatakse filtrite reguleerimiseks enne testimist esmalt vastava müra sagedust ja taset.
Pärast seda, kui signaal läbib filtreid ja võimendusteed, koos lainete muundumisega kontrollitava toote pinnal, toimub AE allika algimpulsside edasine moonutamine. Nad omandavad bipolaarse võnkuva iseloomu, nagu on näidatud joonisel 10.2. Signaalide töötlemise ja informatiivse parameetrina kasutamise edasise protseduuri määravad erinevate tootjate vastavates seadmetes kasutatavad andmehõive ja nende järeltöötluse arvutiprogrammid. Sündmuste arvu ja nende amplituudi määramise õigsus ei sõltu mitte ainult nende registreerimise võimalusest (seadmete eraldusvõimest), vaid ka registreerimismeetodist.
Näiteks kui salvestate signaali mähisjoone impulsse, mis on kõrgemad tasemest , siis salvestatakse neli impulssi ja kui registreerite samast tasemest kõrgema võnketugevuse, salvestatakse üheksa impulssi. Impulsi all mõistetakse lainete jada, mille sagedus on tööpiirkonnas, mille mähis ületab impulsi alguses ülespoole ja impulsi lõpus allapoole.
Seega sõltub registreeritud impulsside arv riistvaraseadetest: sündmuse lõpu ajalõpu väärtus. Kui ajalõpp on piisavalt suur, siis saab salvestada näiteks neli impulssi, kui see on väike, siis kõik tasemest kõrgemad võnked (joonisel 10.2 kaheksa) saab salvestada impulssidena. Suuri vigu võib tekitada ka signaali sagedusriba laiuse ja eristustaseme kasutamine, eriti kui AE signaalid on amplituudilt võrreldavad müratasemega.
AE kontrolli tulemuste hindamine.
Pärast vastuvõetud signaalide töötlemist esitatakse seire tulemused tuvastatud (valedefektide välistamiseks) ja klassifitseeritud AE allikate kujul. Klassifitseerimine toimub järgmiste AE-signaalide põhiparameetrite abil:
· akustilise emissiooni koguarv – registreeritud AE impulsside arv, mis ületab kehtestatud eristustaseme (läve) vaatlusaja intervalli jooksul;
· akustilise emissiooni aktiivsus - registreeritud AE impulsside arv ajaühikus;
· akustilise emissiooni loendusmäär – akustilise emissiooni koguloenduse ja vaatlusaja intervalli suhe;
· akustilise emissiooni energia - energia, mis vabaneb AE allikast ja edastatakse materjalis tekkivate lainete kaudu;
· akustiliste emissioonisignaalide amplituud, impulsi kestus, AE sündmuse tõusuaeg.
AE-de koguarv ja aktiivsus plastilise deformatsiooni ajal on võrdelised deformeerunud materjali mahuga. AE signaalide ja energia amplituud pragude tekkimisel on otseselt proportsionaalne selle kasvu kiiruse ja maksimaalsete pingetega antud tsoonis.
AE allikate klassifitseerimisel võetakse arvesse ka nende kontsentratsiooni, kontrollitava objekti laadimisparameetreid ja aega.
Identifitseeritud ja tuvastatud AE allikad vastavalt standardile PB 03-593-03 “Anumate, seadmete, katelde ja protsessitorustike akustiliste emissioonide testimise korraldamise ja läbiviimise reeglid” on soovitatav jagada nelja klassi:
· esimene on passiivne allikas, mis on registreeritud selle arengu dünaamika analüüsimiseks;
· teine on aktiivne allikas, mis nõuab täiendavat kontrolli muude meetodite abil;
· kolmas on kriitiliselt aktiivne allikas, mis nõuab olukorra arengu jälgimist ja abinõude rakendamist, et valmistuda võimalikuks koormuse langemiseks;
· neljas - katastroofiliselt aktiivne allikas, mis nõuab koormuse viivitamatut vähendamist nullini või väärtuseni, mille juures allika aktiivsus väheneb teise või kolmanda klassi tasemele.
Võttes arvesse AE-d iseloomustavate parameetrite suurt hulka, toimub allikate määramine vastavasse klassi, kasutades mitmeid kriteeriume, mis võtavad arvesse parameetrite kogumit. Kriteeriumide valik viiakse läbi vastavalt standardile PB 03-593-03, sõltuvalt kontrollitavate objektide materjalide mehaanilistest ja akustiliste emissioonide omadustest. Kriteeriumid hõlmavad järgmist:
· amplituud, mis põhineb impulsside amplituudide registreerimisel (vähemalt kolm ühest allikast) ja nende võrdlemisel läve () ületamise väärtusega, mis vastab materjali prao kasvule. Määramine eeldab proovide materjali uurimist eelkatsetes;
· integraal, mis põhineb AE allikate aktiivsuse hinnangu võrdlemisel nende allikate suhtelise tugevusega igas salvestusintervallis. Sel juhul on määramiseks vaja eeluuringutes kindlaks teha koefitsiendi väärtus;
· lokaalne-dünaamiline, kasutades asukohasündmuste AE-de arvu muutust rõhu hoidmise etappidel ja asukohasündmuse energia või ruudu amplituudi muutuste dünaamikat objektikoormuse suurenemisega. Seda kriteeriumi kasutatakse selliste objektide seisundi hindamiseks, mille struktuur ja materjali omadused pole täpselt teada. See asjaolu muudab selle kriteeriumi praktiliselt oluliseks, eriti kui diagnoositakse välitingimustes;
· integraal-dünaamiline, mis klassifitseerib AE allika sõltuvalt selle tüübist ja auastmest. Allika tüübi määrab energia vabanemise dünaamika, mis põhineb AE signaalide amplituudil vaatlusintervalli jooksul. Allika aste määratakse selle kontsentratsiooniteguri C ja koguenergia arvutamise teel. Kontsentratsioonikoefitsiendi arvutamiseks on vaja määrata AE allika keskmine raadius. Samal ajal ei määra väärtust akustilise emissiooni seadmed, mis takistab selle kriteeriumi praktikas rakendamist;
· ASME koodi kriteeriumid, mis on mõeldud tsooni asukohale ja nõuavad AE parameetrite lubatud väärtuste tundmist, mis hõlmab jälgitavate materjalide omaduste eeluuringut ja jälgitava objekti kui akustilise kanali arvestamist.
MONPAC-tehnoloogia näeb ette AE allikate klassifitseerimise vastavalt jõuindeksi ja ajaloolise indeksi väärtustele. Klass määratakse tasapinnalise diagrammi abil sõltuvalt nende indeksite väärtusest. Seda klassifikatsiooni kasutatakse MONPAC-tehnoloogias, kasutades PAS-i (Physical Acoustics Corporation) seadmeid.
Pideva AE kriteeriumide järgi, mida tavaliselt jälgitakse lekke tuvastamise ajal, liigitatakse olukord järgmiselt:
· klass 1 - pideva AE puudumine;
· klass 4 - pideva AE registreerimine.
AE efekti ilmnemiseks tuleb energiat vabastada. Materjali AE kiirguse mustreid, mis on põhjustatud selle struktuuri dünaamilisest lokaalsest ümberstruktureerimisest, sealhulgas nii plastilisest deformatsioonist kui ka pragude tekkest ja kasvamisest, uuritakse vastavate proovide mehaanilise pinge all.
AE plastilise deformatsiooni ajal on reeglina pidev tüüpi emissioon, mis on pideva raadiosignaali kujul, mis sarnaneb müraga. AE protsessi iseloomustamiseks kasutatakse sageli akustilise emissiooni väärtust – nii impulsside arvu kui ka nende amplituudi arvestavat parameetrit, mis on võrdeline aktiivsuse või loenduskiiruse korrutisega ja signaalide keskmise amplituudiga ajaühikus. Enamiku metallide puhul langeb nende plastilise deformatsiooni ajal maksimaalne aktiivsus, loenduskiirus ja AE efektiivne väärtus kokku voolavuspingega.
Joonisel 10.3 on näidatud AE () efektiivse väärtuse sõltuvus siledate proovide pinge ajal koos pinge ()-deformatsiooni () diagrammiga. Sõltuvus 1 vastab Armco rauale ja madala süsinikusisaldusega terasele (süsinikusisaldusega kuni 0,015%) ning tähistab pidevat AE-d, mille maksimum on hamba (platvormi) saagikustsoonis. Sõltuvus 2 on tüüpiline karbiide sisaldava struktuurse süsinikterase jaoks ja sisaldab lisaks pidevale AE-le eraldi suure amplituudiga impulsse, mis on seotud perliitterasest tsementiitplaatide hävitamisega.

Joonis 10.3.AE (U) efektiivse väärtuse sõltuvus siledate proovide pingest koos pinge () - deformatsiooni () diagrammiga
Maksimaalne AE aktiivsus hamba tsoonis ja saagise platoo on seletatav kristallvõre defektide (dislokatsioonide) massilise tekke ja liikumisega üleminekul plastsele deformatsioonile ning pöördumatute muutuste kuhjumisega struktuuris. Siis aktiivsus väheneb tänu sellele, et äsja tekkinud nihestuste liikumine on piiratud olemasolevate poolt. Korduva laadimise korral ilmub "pöördumatuse" efekt, mida nimetatakse Kaiseri efektiks. See seisneb selles, et korduval laadimisel pärast lühikest aega seadme fikseeritud tundlikkuse tasemel ei registreerita AE-d enne, kui varem saavutatud koormustase on ületatud. Tegelikult ilmuvad AE signaalid juba laadimise algusest peale, kuid nende suurus on nii väike, et jääb alla seadmete tundlikkuse taseme. Samal ajal registreeritakse korduval laadimisel pärast pikka aega AE varem saavutatust madalamal koormustasemel. Seda efekti, mida nimetatakse Felicita efektiks, seletatakse koormuse eemaldamisel nihestuste vastupidise liikumisega.
Suurimat ohtu kujutavad endast pragulaadsed defektid, mille tekkimine põhjustab enamasti õnnetusi ja konstruktsiooni hävinemist. Prao tekkimine ja kasv toimub järsult ning sellega kaasnevad erinevad vastava amplituudiga eraldi impulsid. Nii looduslike pragude kui ka tehislõigetega materjalides tekib pinge kontsentratsioon defekti tipus, kui objekt on koormatud töö- või katsekoormustega. Kui lokaalne pinge jõuab materjali voolavuspiirini, tekib plastilise deformatsiooni tsoon. Selle tsooni maht on võrdeline pinge tasemega, mida iseloomustab nende pingete intensiivsustegur TO. Kui kohalikud pinged ületavad tõmbetugevust, tekib mikromurd – defekti pikkuse järsk suurenemine, millega kaasneb AE impulss. Impulsside arv N kasvab suurenedes TO. Kogu AE sõltuvus N stressi intensiivsuse faktorist TO paistab nagu
AE signaalide amplituud pragude kasvu ajal võib ulatuda 85 dB või rohkem. Plastilise deformatsiooni korral ei ületa AE signaalide amplituud tavaliselt 40...50 dB. Seega on AE amplituudide erinevus üks peamisi märke plastilise deformatsiooni ja pragude kasvu erinevusest.
AE seire tulemused esitatakse registreeritud AE allikate loeteluna, mis on määratud kindlale klassile, kasutades aktsepteeritud kriteeriumi. Allika asukoht on näidatud kontrollitava objekti pinnaskaneerimisel (joonis 10.4). Jälgitava objekti seisukorda hinnatakse omakorda ühe või teise klassi AE allikate olemasolu järgi selles.

Joonis 10.4.AE allikate asukoha skeem veresoone skaneerimisel ja registreeritud defektide asukoht:
1 - kest 1; 2 - kest 2; 3 - õhu sisselaskeava; 4 - kest 3; 5 - alumine põhi; 6 - kondensaatori äravoolu liitmik; 7 - kaevukaev; 8 - manomeetri liitmik; 9 - kaitseklapi liitmik; 10 - ülemine põhi; I-VIII - AE vastuvõtjate numbrid
Juhul, kui objekti tehniline seisukord on PKT seire tulemuste põhjal hinnatud positiivselt või puuduvad registreeritud KH allikad, ei ole täiendavate tõrjeliikide kasutamine vajalik. Kui tuvastatakse teise ja kolmanda klassi AE allikad, kasutatakse tuvastatud AE allikate lubatavuse hindamiseks täiendavaid mittepurustavaid katseid.
AE juhtimisseadmed
AE seireseadmete struktuuri määravad järgmised põhiülesanded: AE signaalide vastuvõtmine ja tuvastamine, nende võimendamine ja töötlemine, signaali parameetrite väärtuste määramine, tulemuste salvestamine ja teabe väljastamine. Seadmed on erineva keerukuse, otstarbe, transporditavuse ja klassi poolest sõltuvalt saadud teabe hulgast. Kõige levinumad on mitme kanaliga seadmed, mis võimaldavad koos AE parameetritega määrata signaaliallikate koordinaate koos testiparameetrite (koormus, rõhk, temperatuur jne) samaaegse registreerimisega. Selliste seadmete talitlusskeem on näidatud joonisel 10.5.

Joonis 10.5.AE seireseadmete funktsionaalne skeem
Seadmed sisaldavad järgmisi põhielemente, mis on ühendatud kaabelliinidega: 1 - akustilise emissiooni muundurid (AEC); 2 - eelvõimendid; 3 - sagedusfiltrid; 4 - põhivõimendid; 5 - signaalitöötlusplokid; 6 - põhiprotsessor kontrollitulemuste töötlemiseks, salvestamiseks ja esitamiseks; 7 - juhtpaneel (klaviatuur); 8 - videomonitor; 9 - parameetriliste kanalite andurid ja kaabliliinid.
Seadmeelemendid 3 - 8 on reeglina valmistatud ühe ploki kujul (näidatud joonisel 10.5 punktiirjoonega) sülearvuti baasil.
Akustilise emissiooni muundurit kasutatakse elastsete akustiliste vibratsioonide muundamiseks elektrilisteks signaalideks ja see on AE juhtimise riistvarakompleksi kõige olulisem element. Kõige levinumad on piesoelektrilised PAE-d, mille disain erineb vähe ultraheli testimisel kasutatavatest piesoelektrilistest muunduritest (PET).
Disaini järgi eristatakse järgmisi PAE tüüpe:
· ühepooluseline ja diferentsiaal;
· resonants-, lairiba- või ribapääs;
· kombineeritud eelvõimendiga või kombineerimata.
Tundlikkuse taseme järgi jagunevad PAE-d nelja klassi (1-4), sagedusvahemike järgi - madalsageduslikeks (kuni 50 kHz), standardtööstuslikeks (50...200 kHz), eritööstuslikeks (200). ...500 kHz) ja kõrgsagedusel (üle 500 kHz). Elastsete vibratsioonide sumbumine väheneb nende sageduse vähenedes, mistõttu kasutatakse madala sagedusega PAE-sid eelkõige laiendatud objektide, näiteks torujuhtmete ja kõrge vibratsioonisummutusega objektide jälgimisel.
Väikeste, kuni 1 m pikkuste objektide juhtimiseks kasutatakse spetsiaalseid PAE-sid, laboriuuringute läbiviimisel kasutatakse kõrgsageduslikke.
Sõltuvalt amplituud-sageduskarakteristikutest eristatakse PAE-sid resonants- (pääsriba 0,2, kus on PAE töösagedus), ribapääs (ribalaius 0,2...0,8) ja lairiba (ribalaius üle 0,8).
Peamine erinevus PAE ja otsesondide vahel on summutusomadused, mis on vajalikud piesoelektrilise plaadi vabade loomulike vibratsioonide summutamiseks, samuti piesoelektrilise plaadi enda paksus. PAE piesoplaadi tagakülg võib jääda vabaks või osaliselt või täielikult summutatud.
PAE üks peamisi omadusi on avaldise põhjal määratud teisenduskoefitsient k
kus on piesoelektrilise plaadi maksimaalne elektripinge V; - kontrollitava objekti osakeste maksimaalne elastne nihe vahetult PAE all, m.
Teisenduskoefitsiendi mõõde on V/m ja see määrab PAE tundlikkuse. K maksimaalne väärtus esineb kitsaribaliste resonants-PAE-de korral, mille tagakülg ei ole summutatud. Mehaaniline summutamine viib PAE tundlikkuse võrdsustamiseni laiemas vahemikus, kuid absoluutne tundlikkus (konversioonikoefitsient k) väheneb oluliselt.
PAE kinnitamine katseobjekti pinnale toimub mitmel viisil: kasutades liimi, klambreid, klambreid, magnethoidjaid, kasutades püsivalt paigaldatud sulgusid jne. Tööstusliku AE testimise praktikas kasutatakse peamiselt resonantsi PAE-sid, kuna nende tundlikkus on palju suurem. Ühe sellise muunduri konstruktsioon on näidatud joonisel 10.6.

Joonis 10.6.JSC Eltesti resonantse PAE disaini skeem:
1 - lehtvedru;
2 - magnethoidiku püsimagnet;
3 - keha; 4 - survekork;
5 - isejoonduv sfääriline klamber;
6 - elektriline pistik; 7 - piesoelektriline element;
8 - keraamiline kaitse
PAE kinnitatakse magnetklambriga. Maksimaalse tundlikkuse tagamiseks on plaadi tagumine pool tehtud vabaks ja külgpind summutab ühend vaid 30%.
Akustilise emissiooni muundur ühendatakse lühikese (mitte üle 30 cm pikkuse) kaabli abil eelvõimendiga (vt joonis 10.5). Koos võimendusega (tavaliselt kuni 40 dB) parandab eelvõimendi signaali-müra suhet signaali edastamisel kaabelliini kaudu põhiseadmesse (3–8), kaugjuhtimispuldiga kuni 150 dB kaugusel. .200 m.
Filter määrab sageduse edastusspektri. Filter on reguleeritud nii, et võimalikult palju erinevate sagedustega müra ära lõigata.
Peavõimendi on ette nähtud signaali tugevdamiseks, mis nõrgeneb pärast kaabelliini läbimist. Sellel on ühtlane amplituud-sagedusreaktsioon võimendusega 60...80 dB.
Elektromagnetiliste häirete summutamiseks on kogu kanal, sealhulgas PAE, eelvõimendi, põhiseade ja ühenduskaabliliinid, varjestatud. Tihti kasutatakse ka elektromagnetiliste häirete summutamise diferentsiaalset meetodit, mis põhineb asjaolul, et PAE piesoelektriline plaat lõigatakse kaheks osaks ja üks pool pööratakse ümber, muutes nii selle polarisatsiooni. Järgmisena võimendatakse kummagi poole signaalid eraldi, ühe poole signaalide faasi muudetakse l võrra ja mõlemad signaalid liidetakse. Selle tulemusena on elektromagnetilised häired faasist väljas ja summutatud.
Signaalitöötlusseade salvestab nende saabumise aja, registreerib üle seatud eristustaseme signaalid, teisendab signaalid digitaalseks ja salvestab need. Erinevate kanalite kaudu salvestatud AE signaalide lõplik töötlemine toimub põhiprotsessori abil, mis määrab ka AE signaalide allika asukoha (asukoha). Lineaarse objekti (näiteks torujuhtme) jälgimisel piisab kahe PAE olemasolust; võrreldavate üldmõõtmetega tasapinnaliste objektide jaoks ja suur ala pind – vähemalt kolm allikat ümbritsevat PAE-d.
AE allikast, näiteks praost, pärit signaale iseloomustab asjaolu, et neid kiirgab üks allikas, need on lühiajalised ja nende PAE-sse saabumise aeg peegeldab kaugust praoni. AE allika asukoht tasapinnal leitakse triangulatsioonimeetoditega. Lähtudes materjalis laine levimise kiirusest ja signaali saabumisaegade erinevusest erinevatel PAE-del, arvutatakse välja AE allika punktide komplekt, mis paiknevad raadiusega ringidel ja vastavad PAE-d (joonis 10.7, a). AE allika ainus tegelik asukoht määratakse kolmnurkade lahendamisega, mille kõik kolmnurgad on teada. Selleks fikseeritakse tootel oleva PAE koordinaadid võimalikult suure täpsusega ja sisestatakse enne testimist pinnaskaneerimisel plokki 6 (vt joonis 10.5).

Joonis 10.7.AE allika asukoha skeemid:
a - tasapinnaline (tasapinnal); b - lineaarne
Lineaarne asukohadiagramm on näidatud joonisel 10.7, b. Kui AE allikas ei asu PAE-de vahel keskel, siis saabub kaugema PAE signaal hiljem kui lähitule. Olles fikseerinud PAE vahelise kauguse ja signaali saabumise aja erinevuse, arvutatakse valemite abil defekti asukoha koordinaadid
AE meetod võimaldab kontrollida kogu katseobjekti pinda. Katsetamise läbiviimiseks peab PAE paigaldamiseks olema tagatud otsene juurdepääs katseobjekti pinna aladele. Sellise võimaluse puudumisel saab näiteks maa-aluste magistraaltorustike perioodilise või pideva seire teostamisel neid pinnasest vabastamata ja isoleerimata kasutada kontrollitava objekti külge püsivalt kinnitatud lainejuhte.
Asukoha täpsus peab olema vähemalt kaks seinapaksust või 5% PAE-de vahelisest kaugusest, olenevalt sellest, kumb on suurem. Vead koordinaatide arvutamisel määravad vead signaali muundurisse saabumise aja mõõtmisel. Veaallikad on:
· ajavahemike mõõtmise viga;
· erinevus tegelike ja teoreetiliselt aktsepteeritud levimisteede vahel;
· anisotroopia olemasolu signaali levimise kiiruses;
· signaali kuju muutumine läbi struktuuri levimise tulemusena;
· signaalide ajaline kattumine, samuti mitme allika tegevus;
· erinevat tüüpi lainemuundurite registreerimine;
· viga heli kiiruse mõõtmisel (seadistamisel);
· viga PAE koordinaatide määramisel ja lainejuhtide kasutamisel.
Enne objekti laadimist kontrollitakse seadmete funktsionaalsust ja hinnatakse simulaatori abil viga koordinaatide määramisel. See paigaldatakse objekti valitud punkti ja koordinaatide määramise süsteemi näitu võrreldakse simulaatori tegelike koordinaatidega. Simulaatorina kasutatakse piesoelektrilist muundurit, mida ergastavad generaatori elektriimpulssid. Samal eesmärgil võib kasutada nn Su-Nielseni allikat (0,3...0,5 mm läbimõõduga grafiitvarda murd, kõvadus 2T (2H)).
AE allikate asukoha visualiseerimine toimub videomonitori abil, millel allikad on kujutatud kontrollitava objekti skaneerimisel vastavas kohas (vt joonis 10.4) erineva heleduse, värvi või kujuga valguspunktidena. (olenevalt kasutatavast tarkvarast). Juhtimistulemuste dokumenteerimine toimub põhiprotsessoriga ühendatud sobivate välisseadmete abil.
Eespool käsitletud meetodit AE allikate asukoha määramiseks, mis põhineb signaalide saabumisaja erinevuse mõõtmisel, saab kasutada ainult diskreetse AE jaoks. Pideva AE korral muutub signaali viivitusaja määramine võimatuks. Sel juhul saab AE allika koordinaate määrata nn amplituudimeetodil, mis põhineb signaali amplituudi mõõtmisel erinevate AE-dega. Diagnostilises praktikas kasutatakse seda meetodit kontrollitava toote aukude kaudu lekete tuvastamiseks. See seisneb erinevate PAE-de poolt vastuvõetud lähtesignaali amplituudi tulpdiagrammi koostamises (joonis 10.8). Sellise histogrammi analüüs võimaldab tuvastada lekke asukoha. Mugav lineaarsete objektide, näiteks nafta- ja gaasijuhtmete diagnoosimiseks.
Kõige universaalsemad on AE kontrollimeetodil põhinevad diagnostikaseiresüsteemid. Sellise süsteemi riistvaralahendus sisaldab tavaliselt järgmist:

Joonis 10.8. AE allikate määramise amplituudimeetodi illustratsioon: 1-7 - AE vastuvõtjate arv
· akustilise emissiooni seadmete standardühikud;
· täiendavate mittepurustavate katsete tüüpide igat tüüpi primaarmuundurite koordineerimis- ja lülitusüksused, mille koostise määrab kontrollitava objekti tüüp;
· kontrolli- ja otsustusüksused, mis põhinevad kontrollitava objekti hetkeseisu puudutava diagnostilise teabe tulemustel.

Joonis 10.8.AE allikate määramise amplituudimeetodi illustratsioon: 1-7 - AE vastuvõtjate arv
AE kontrolli protseduur ja kohaldamisala
Iga rajatise jaoks töötatakse välja sobiv juhtimistehnoloogia. Töö AE kontrolliga algab PAE paigaldamisega rajatisse. Paigaldamine toimub otse objekti puhastatud pinnale või tuleb kasutada vastavat lainejuhti. AE allikate asukoha määramiseks suure pindalaga mahulisel objektil paigutatakse AE rühmade (antennide) kujul, millest igaüks kasutab vähemalt kolme muundurit. Lineaarses rajatises kasutatakse igas rühmas kahte PAE-d. PAE paigutuse ja antennirühmade arvu määrab objekti konfiguratsioon ja PAE optimaalne paigutus, mis on seotud signaali sumbumisega ja AE allika koordinaatide määramise täpsusega.
Sõltuvalt konfiguratsioonist jagatakse objekt eraldi elementaarseteks osadeks: lineaarne, tasane, silindriline, sfääriline. Iga sektsiooni jaoks valitakse sobiv muundurite paigutus. AE-de vaheline kaugus valitakse selliselt, et AE-simulaatori (graafikavarda painde), mis asub kontrollitavas piirkonnas, signaal tuvastatakse koordinaatide arvutamiseks vajaliku minimaalse arvu muundurite abil.
PAE paigutus peaks reeglina tagama kontrolli kogu objekti pinna üle. Samas on mitmel juhul, eriti suuremõõtmeliste objektide jälgimisel, lubatud PAE paigutada ainult nendesse objekti piirkondadesse, mida peetakse kõige olulisemaks.
Pärast PAE paigaldamist juhitavale objektile kontrollitakse AE süsteemi funktsionaalsust AE simulaatori abil, mis asub igast PAE-st teatud kaugusel. AE signaali salvestatud amplituudi hälve ei tohiks ületada ± 3 dB kõigi kanalite keskmine väärtus. Kanali võimenduse ja amplituudi eristamise lävi valitakse, võttes arvesse AE signaalide eeldatavat amplituudivahemikku. Samuti tehakse muid selle objekti juhtimistehnoloogiaga ette nähtud kontrolle.
Uuritavate objektide tehnilise seisukorra AE seiret teostatakse ainult siis, kui konstruktsioonis tekib pingeseisund, mis käivitab objekti materjalis AE allikate töö. Selleks rakendatakse objektile peale ettevalmistus- ja reguleerimistööde tegemist jõu-, rõhu-, temperatuurivälja jms koormust. Koormuse tüübi valiku määrab objekti projekt ja selle töötingimused, katsete iseloom ja see on antud AE tehnoloogias konkreetse objekti jälgimiseks.
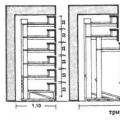 Spordi ja tervisliku eluviisi artiklite kataloog Võimlemisratsaspordi ja muude võistluste ala
Spordi ja tervisliku eluviisi artiklite kataloog Võimlemisratsaspordi ja muude võistluste ala Suvised külaskäigud dacha lugudesse
Suvised külaskäigud dacha lugudesse Ühiskonna mõju inimesele Inimeste klassid ühiskonnas
Ühiskonna mõju inimesele Inimeste klassid ühiskonnas